随着无线技术更多地嵌入诸如车载雷达和机器对机器通信等“关键任务”应用中,新的测试方法也相应出现,以确保系统的可靠性。其中一种RF驱动系统测试方法便是“硬件在环(HIL) 测试”,该测试方法属于“实时”测试类。今天,小编就将带你透过美国国家仪器大咖工程师David A. Hall的视角了解HIL测试及其在自动驾驶测试中的发展趋势。
HIL测试所采用的原理,即认为测试工程师可以创建出测试系统,以仿真现实世界中典型存在实体系统,这并非是新的理念。然而,RF技术在诸如车载雷达等关键任务应用中的日益普及,使得HIL测试成为无线应用越来越常用的测试方法。
HIL测试系统的架构
HIL测试的理念最初是作为测试航空航天和汽车工业复杂控制系统的机制而被提出来的。在典型的应用中,工程师可以通过利用HIL测试系统模拟电气信号和发动机的行为来测试发动机的电子控制单元(ECU)。在本应用中,该测试系统结合了输入和输出(常被称为“I/O”)用模拟和数字模拟接口,以及确定性处理元件,以有效仿真系统(如图1所示)。

图1、典型HIL 测试系统方块图
近年来,RF技术用作关键传感和通信技术的趋势使得很多RF系统工程师开始使用相似的测试方法。在典型的RF HIL测试系统中,相对低速的模数转换器(ADC) 和数模转换器(DAC) 被替换成了向量信号产生器和分析器。事实上,这些应用中所使用的HIL测试系统在架构上常常跟软件无线电(SDR) 类似。不过,很多嵌入式处理元件仍保持相同。RF HIL系统的常见应用包括信道仿真、信道测量、实时GNSS模拟、雷达目标生成和认知测试。
最令人振奋的实时测试应用是车载雷达测试——既包括其作为单独产品,又包括其作为更复杂高级驾驶辅助系统(ADAS) 组成的情况。现代ADAS技术结合了雷达(传统上是在24GHz 波段,现在日益朝77和79GHz波段发展)、摄像机、超声波和LIDAR 技术来感测周围环境。ADAS设计的复杂度覆盖了从较为简单的盲点侦测报警指示器到全自动驾驶系统。虽然今天的很多关键汽车传感技术年代都相对较久远了(事实上,首款车载雷达原型可追溯至1950年代末),但传感器尺寸和成本的改进以及信号处理技术的进步已经让自动驾驶系统变得更为可行。
HIL测试用于车载雷达应用
雷达传感器测试需要工程师验证装置的电磁特性和功能特性。例如,典型的RF 测量可能包括输出功率和脉冲线性(通过解调FMCW输出进行测量)。同样重要的还有包括测距精度、距离分辨率以及在受干扰情况下检测物体的能力等功能特性。
为了测试物理和功能特性,雷达测试中越来越多地使用既可以配置为测量仪器,又可以配置为雷达目标生成器的测试设备。在本例中,测试系统利用其实时信号处理元件从根本上让雷达传感器相信其看到的一个物体或目标,而实际上只不过是一台测试设备。这个过程,被称为“目标仿真”或“目标生成”,是使用信号处理来重建物体反弹雷达刺激的电磁响应。
图2所示为雷达目标生成的两种方法。第一种方法被称为“被动式目标生成”法,即使用一根延迟线模拟雷达刺激的来回传播时间。第二种方法被称为“主动式目标模拟”法,即使用HIL 测试系统以数字方式重建雷达系统的环境。在典型的主动式目标模拟器中,由宽带向量信号分析器接收来自雷达传感器的刺激。仪器上载有的嵌入式处理器向模拟距离和都卜勒位移施加延迟作用,以模拟速度。最后,由向量信号产生器将这一数字创建的雷达环境生成信号,反馈回雷达传感器。
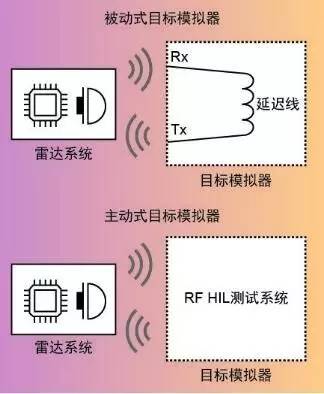
图2、被动式雷达目标生成器与主动式雷达目标生成器
对于给定的应用,根据所模拟的对象类型,可以选择被动式雷达目标模拟或主动式雷达目标模拟方法。例如,被动式模拟器在模拟短距离目标方面性能更好,而主动式模拟器则可以模拟更为复杂的驾驶场景,如变道或物体穿过马路。
奥迪使用HIL测试助力驾驶测试
NI已经联手多家领先的汽车制造商致力于改进下一代雷达测试技术。例如,在德国奥迪公司着手开发全自动驾驶汽车的开拓性研究工作中,NI最近便与其进行了合作。
奥迪团队认识到,安全和可靠性是新一代自动驾驶汽车的重点。因此,奥迪采用HIL测试在实验室环境下模拟ADAS系统环境。通过在实验室模拟典型的驾驶测试,奥迪实现了在设计过程中提早改进嵌入式软件可靠性,甚至能够发现原本要等到实际驾驶测试才会暴露的故障。
图3所示的奥迪目标仿真系统结合了NI的第二代向量信号收发器(VST) ,配有专为79GHz雷达频带设计的上转换器和下转换器。在本场景中,VST起到了软件无线电的功能,且使用LabVIEW可编程FPGA能够为仿真雷达目标执行实时信号处理例行程序。奥迪股份公司雷达组件负责人Neils Koch博士表示“PXI VST实现了宽带和低时延软件的结合,使得我们可以在雷达模块中发现原本无法检测到关键故障”。
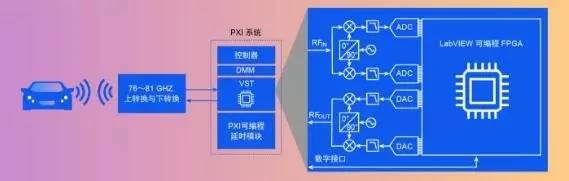
图3、奥迪主动式目标仿真系统方块图
ADAS趋势
展望未来,结合多重传感技术,利用每个技术的比较优势是ADAS设计的大势所趋。例如,在测量物体距离(甚至是在夜间或多雾条件下)方面,雷达通常都是最精确的技术。然而,基于摄像头的图像识别在确定物体的准确位置方面则更为精准。通过将多种传感器的输入整合入“传感器融合”架构,能够提升ADAS 感测周围环境的能力(如图4所示)。
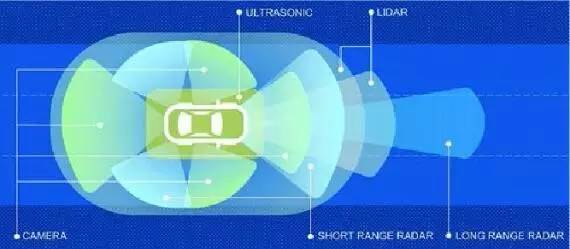
图4、自动驾驶汽车集成多重传感技术
传感器融合,加上对将诸如神经网络算法用于对象检测的依赖性的提升,将长期持续提升嵌入式软件测试的重要性。未来,工程师将更多地将雷达测试与高度同步且极其灵活的HIL测试系统内的其它嵌入式传感器技术相结合。
RF HIL测试的其它应用
虽然雷达目标仿真是一项短期来看很可能影响消费者的HIL应用,但这却只是RF HIL测试新兴应用的一个方面。例如,在国防工业,工程师采用相似的测试策略模拟先进电子环境。此外,在无线产业,工程师也将相似的HIL技术用于越来越复杂的实时信道测量。
如今的RF HIL测试系统与工程师在5G通信系统原型化方面所使用的高级软件无线电技术在架构上惊人地相似。与雷达目标仿真相似,实时对刺激信号进行解译和反应必须具备宽带RF前端和密集型信号处理元件。因此,诸如诺基亚、英特尔和三星等公司实现5G系统原型化的诸多相同技术创新与更广泛的RF HIL测试应用其实是相同的技术。
结论
诸如自动驾驶汽车等日益复杂的系统正快速改写测试和测量设备供应商设计仪器所必须遵循的规则。过去,仪器只是报告信号模拟特性的机制。如今,仪器还被用来报告系统的功能特征。今后,软件技术将成为工程师构建越来越复杂的测量系统,以报告从最简单的RF组件到全自动驾驶汽车特性的关键技术。对于测试设备供应商而言,软件仍是关键的投资领域,且通过软件区分产品的能力将最终定义行业内谁输谁赢。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号