1.引言
通常微波所指的是分米波、厘米波和毫米波。关于其频率范围,一种说法是:
300MHz ~ 300GHz(1MHz =106Hz,1GHz =109 )相应的自由空间中的波长约为1m~1mm.
微波技术的兴起和蓬勃发展,使得国内大多数高校都开设微波技术课程。但还存在以下问题:测量时,由手工逐点移动探头并记录各点读数,然后手工计算实验结果并绘图。测量项目单一、精度低、测量周期长,操作也较为繁琐。本文主要研究一种实用的基于Labview的速调管微波频率自动测量系统。
2.系统整体结构
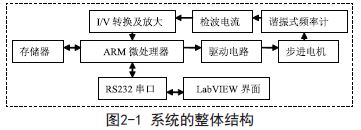
系统的整体结构如图2-1所示。由下位机跟上位机构成。微处理器通过驱动电路来控制步进电机,带动谐振式频率计的套筒转动,处理器采样检波电流,传送到上位机LabVIEW界面显示,并利用PC机强大的数据处理功能,分析出电流最小值,计算出所测频率。
3.系统硬件设计
3.1 微处理器系统电路的设计
本系统选用的微处理器是S3C44B0.2.5VARM7TDMI内核,3.0~3.6V的I/O操作电压范围。可通过PLL锁相环倍频高至66MHz;71个通用I/O口;内嵌有8通道10位ADC,本系统选取了通道1作为晶体检波器电流输入通道。
3.2 复位电路
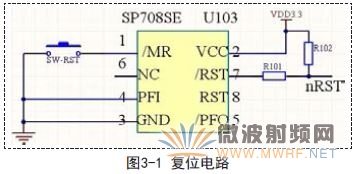
系统没有采用RC电路作为复位电路,而使用了电压监控芯片SP708SE,提高了系统的可靠性。复位电路的RST 端连接到S3C44B0的复位引脚nRESET,因为S3C44B0的复位信号是低电平有效,所以当系统掉电或复位按键SW_RST被按下时,电源监控芯片RST 引脚立即输出复位信号,使S3C44B0芯片复位。
3.3 谐振式频率计自动测量电路的设计
3.3.1 定标法测频率原理
为了实现频率的自动化测量,本系统采用步进电机带动频率计的转动,当腔体转到了谐振位置时候,到达检波器的微波功率明显下降,检波电流出现明显的下降,而这个位置对应的频率就是所测频率。步进电机带动下的是非只读式频率计,所以先要用定标的方法,拟合出频率与刻度的对应关系式。定标法:同时配合两种频率计,一种是只读式的,可直接读出频率;另一种是非只读式的,只有刻度,不能直接读出频率。首先手动转动非只读式频率计到一个谐振的位置,记录这时的刻度,然后再转动只读式频率计,到另外一个谐振位置,记录对应的频率。重复这种操作,测出尽量多的频率和刻度对应点,根据测得数据再用最小二乘法拟合出两者的对应关系式。最后改换用步进电机带动非只读式频率计转动,当转动到检波电流出现明显的“吸收谷”时,读得这时的刻度,根据拟合出来的刻度与频率关系式,就可得所测频率。
3.3.2 步进电机及自动控制电路
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可通过控制脉冲频率来控制电机转动的速度,达到调速的目的。
本系统采用二相步进电机,具有如下一些特点:只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可实现电机的转动方向;步进角为1.8°的两相四线混合式步进电机,并把细分驱动器的细分数设置为8,电机的运转分辨率为每个脉冲0.225°。为了有效驱动电机,本文采用了基于TA8435H芯片的驱动电路。实际应用电路如下图3-2所示,芯片的输入信号有使能控制、正反转控制和时钟输入。
通过光耦器件TLP521可将驱动芯片跟输入级进行电隔离,起到逻辑电平隔离和保护作用。
M1,M2分别接高电平,所以为1/8细分方式。
由于REF IN引脚接高电平,因此VNF为0.8V.
输出级斩波电流为VNF/RNF=0.8/0.8=1A,因此R212、R213要选用功率大一些的电阻。选用不同的二相步进电机时,应根据其电流大小选择合适的R212和R213.R21和C5组成复位电路,D1~D4快恢复二极管可用来泄放绕组电流。
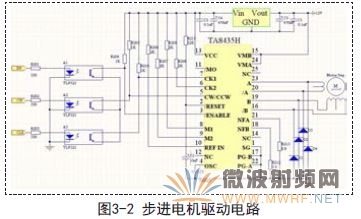
电路中用到微处理器S3C44B0引脚PC0,PC1,PC2给驱动电路分别输出使能,正反转,时钟信号,通过控制输出脉冲的间隔可以控制电机转动的速率,而输出脉冲个数可控制步进电机走动的步数,达到控制频率计腔体位置目的。电路输出端口A, A, B, B接二相步进电机对应输入端子。
3.3.3 检波电流I/V转换及放大电路
检波晶体的作用是将微波微弱信号转换成直流信号。故可观察检波电流是否出现“吸收波谷”来判断腔体是否到达谐振位置。本系统将检波电流经过处理之后传送到上位机的LabVIEW界面显示,观察是否到谐振位置。
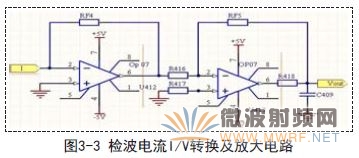
由于微波信号在传输过程中受到外部干扰的噪声,线路的噪声,元器件的噪声等等,因此需要滤波电路来滤除这些干扰信号。由于处理器对信号的采集速率比较低,所以本系统采用了时间常数比较大的由R418和C409构成的低通滤波器。其截止频率为f p =30Hz有利于滤除电路中的尖峰噪声。电路采用两级运放,第一级为I/V转换,第二级为电压反相放大。调节可变衰减器,电机走完全程,观察到检波电流最大值为50.9μ A,因此电路中RF4=1K,R416=1K,RF5=45K,由Vout1=-RF4*I知,经过第一级I/V转换之后最大电压为50.9mV,再经过放大,最终输出电压最大为2.291V,满足S3C44B0的A/D转换输入要求。
4.软件设计
4.1 下位机软件
系统开机复位后,进入while(1)死循环,时刻检测上位机是否发来测量频率的命令,当接受到测量频率命令后,调用测频率模块子程序。频率测量子程序中,电机走完全程需要1854步,每一步带动谐振腔走0.005mm,每一步耗时44.44ms,电机每走动一步,把100次检波电流的A/D转换数据求平均值后再通过串口发送到上位机显示。
4.2 上位机软件设计
在虚拟仪器开发平台LabVIEW中,可以利用基于VISA的仪器驱动模板中的I/O接口函数来方便快速地开发驱动程序。本系统中通过PC机和主控芯片S3C44BO的RS232串行通信实现数据采集的驱动程序正是使用这种方法。
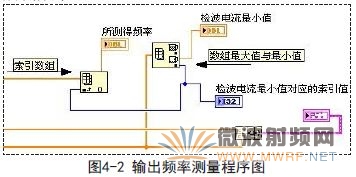
如图3-5频率测量的labview程序图。首先用最大值与最小值函数求出采集到的电流数据的最小值,并求出其对应的索引值,即步进电机在哪一步采集到的电流值,从而把这个索引值反馈回频率数组,求出其对应的元素,则为所测频率。
5.信号源输出频率测量实验结果及分析
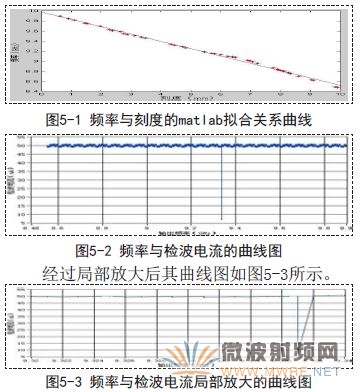
为了在上位机的LabVIEW界面得到所测量的微波信号频率,需在界面中显示出检波电流--频率曲线,从而可明显读出检波电流的“吸收波谷点”.需通过定标法先手工测量频率--距离(当前测量点与起始点的距离,可由套筒刻度算出)的一组尽可能多的数据点,然后利用步进电机每走一步的距离,就可以把距离转化为步数,再用matlab拟合出频率--步数的关系函数。从而可知道步进电机走到哪一步对应哪一个频率。电机走完全程需要1854步,那么把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标。
限于本信号源频率及谐振式频率计测量范围的影响,本系统只能在8.48GHz和9.9GHz范围内测量。因此从套筒的起始位置9.9mm(对应于频率8 . 4 8 G H z ),截止位置0 . 6 3 m m (对应于频率9.9GHz),其全长为9.9mm-0.63mm=9.27mm.由于电机带动套筒每步的距离非常小,因此不能直接测量步进电机一步的距离,利用步进电机没有累计误差的特点,采用步进电机走动180步,测出套筒刻度前后位置差,得出步进电机带动套筒每一步移动平均距离为0.005mm.手工测出频率与刻度的42组数据点,利用MATLAB拟合出图5-1所示曲线。用MATLAB拟合出频率f 与刻度L 线性关系函数为f = ?0.1456* L + 9.9917(0.63mm ≤ L ≤ 9.9mm)。由于电机每步带动套筒移动0.005mm,起始位置在0.63mm,即步进电机走一步后,套筒的位置在0.63mm+0.005mm=0.635mm,而步进电机走完全程需要1854步,套筒的截止位置在0.63+0.005*1854=9.9mm.则刻度L 与步数n 的关系函数为L = 0.005n + 0.63(0 ≤ n ≤1854)。
可推导出频率f 与步数n的函数关系式为f = ?0.000728n + 9.9(0 ≤ n ≤1854)。把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标,利用PC机在LabVIEW描绘的波形图如图5-2所示。
再由LabVIEW自动计算检波电流最小值对应的频率值,如图5-4所示。可知这时信号源输出频率为9.337GHz.

与手工测量做对比。换上可直接测出频率的谐振式频率计,测得这时的频率为9.357GHz,所以自动测量与手动测量的相对误差为:
![]()
本系统设定步进电机走完全程需要82.4秒,不能设得走太快的原因是防止步进电机“丢步”(漏掉了脉冲没有运动到指定的位置)。另外太快很可能检测不到检波电流的“波谷点”.而手工测量一次信号源的输出频率,通常要两分多钟,可见本系统自动测量的实用性。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号