车载 GPS 导航系统是汽车电子的重要应用,随着汽车进入普通家庭并迅速普及,对车载 GPS 的需求也在急速增长。车载 GPS 导航系统由车载 GPS 接收机和导航软件组成,其中车载 GPS 接收机的性能指标直接影响到导航应用的用户体验,是影响产品性能的关键部分。目前车载 GPS 接收机测试并没有统一的标准,与行业大量应用的手机 GPS 测试相比,需要增加面向汽车应用的测试要求,形成更加全面的符合汽车性能特点的车载 GPS 测试方法。本文将主要探讨 GPS 系统原理,车载 GPS 接收机测试主要考虑的问题以及相应的测试方法。
GPS 工作原理
GPS 系统的英文全名是“Navigation Satellite Timing And Ranging/Global Position System”,其意为“卫星测时测距导航/全球定位系统”,缩写为 NAVSTAR/GPS,简称 GPS 系统。该系统是以卫星为基础的无线电导航定位系统,于 1994 年全面建成。GPS 全球卫星定位导航系统,开始时只用于军事目的,现在也广泛应用于商业和科学研究上。GPS 系统能为各类用户提供精密的三维位置、三维速度,并给出精确的卫星时间基准。
GPS 系统包括三大部分: 空间部分-GPS 卫星星座; 地面控制部分-地面监控系统; 用户设备部分-GPS 信号接收机。GPS 卫星星座 GPS 工作卫星及其星座由 21 颗工作卫星和 3 颗在轨备用卫星组成 GPS 卫星星座,卫星高度约 20200 公里,分布在六条升交点互隔 60 度的轨道面上,每条轨道上均匀分布四颗卫星,相邻两轨道上的卫星相隔 40 度,位于地平线以上的卫星颗数随着时间和地点的不同而不同,最少可见到4颗,最多可见到 11 颗。
目前的 GPS 接收机一般为 12 通道,即可同时监测 12 颗卫星,它的主要工作是捕获待测卫星的信号,并跟踪这些卫星的运行,对所接收到的 GPS 信号进行变换、放大和处理,基带芯片进一步解译出 GPS 卫星所发送的导航数据,以便得到 GPS信号从卫星到接收机天线的传播时间,实时地计算出所在的位置和时间。GPS 接收机收到 3 颗卫星的信号可以输出 2D (就是 2 维) 数据,只有经纬度,没有高度,如果收到4颗以上的卫星,就输出 3D 数据,可以提供海拔高度。
GPS 接收机的定位精度是由所使用的扩展码决定的。GPS 系统有两种码,即 C/A 码和P码。C/A 码的误差是 29.3 m 到 2.93 米。一般民用的接收机利用 C/A 码计算定位。P 码的误差为 2.93 米到 0.293 米是 C/A 码的十分之一。但是P码只能美国军方使用。GPS 系统发送的导航数据速率只有 50 bps,通过扩展码扩展到 1.023 Mcps,然后通过 BPSK 调制到射频,频率为 L1 (1575.42 MHz) 和L2 (1227.6 MHz),接收机主要使用L1。
根据 GPS Standard Positioning Service SignalSpecification 标准 (第二版),GPS 信号格式如图 1 所示,主要包括三个部分: TLM (Telemetry)、HOW (Handover Wo r d ) 和导航数据。导航数据主要有卫星的位置信息 (Ephemeris) 和时钟信息(Almanac)。也就是说,如果 GPS 接收机要解算出位置信息,GPS 信号中必须包括这些有效的信息比特。
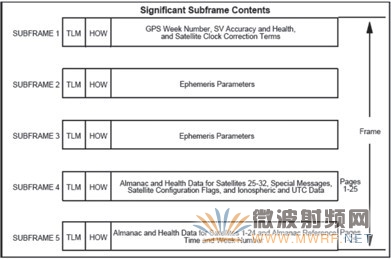
图一
GPS 信号分为 5 种不同的子帧,每个子帧时间长度为 6 秒钟,发送 300 比特有效数据,比特率为 50 bps,经
过 (Ranging Code) 的扩展达到 1.023 MHz 的码片速率 (C/A 码)。GPS 子帧的帧结构分为 3 个部分: TLM、HOW 和导
航数据 (Navigation Data)。
基本的 GPS 接收机测试
典型的 GPS 接收机测试包括首次定位时间 (TTFF),暖启动首次定位时间,重新捕获时间,静态导航精度,接收
机灵敏度,射频干扰等,典型的测试连接如图 2 所示。
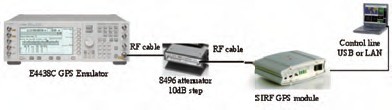
图二
首次定位时间测试
首次定位时间,即 Time to First Fix (TTFF),测量 GPS 接收机从冷启动到实现 GPS 导航定位所需的时间。冷启动是指接收机在不使用当前星历表的情况下开机。通常,将接收机关闭至少 2 小时后再开机就可以实现冷启动。TTFF 是指 GPS 接收机启动 (接通电源) 到通过仿真获得第一个有效的 3D 导航数据点之间的时间间隔。
测试方法是首先启动矢量信号源上的 GPS 仿真模式,然后接通 GPS 接收机。测试至少应收集 20 个 TTFF的有效采样,然后分析这些采样的平均值、最小值和最大值,再计算出标准偏差。如图 3 所示。
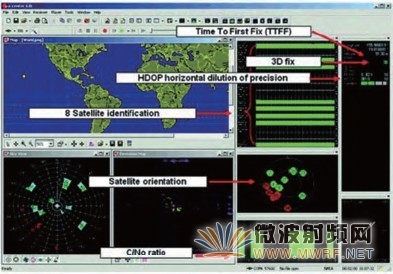
图三
暖启动首次定位时间
暖启动首次定位时间测量 GPS 接收机从暖启动到实现 GPS 导航定位所需的时间。这个测试与之前的冷启动TTFF 测试类似。此测试中的接收机包括所有仿真卫星的当前星历数据。通常,可以通过将之前处于开机状态的接收机关闭一小段时间,然后再启动,来实现暖启动。
测试方法是首先启动矢量信号源上的 GPS 仿真。接着启动 GPS 接收机进行定位。这将确保获得 GPS 接收机的当前星历数据。然后关闭 GPS接收机一小段时间,之后再启动。从启动到实现有效的3D 定位之间的时间间隔就是TTFF。测试至少应收集 50 个TTFF 的有效采样,然后分析这些采样的平均值、最小值和最大值,再计算出标准偏差。
重新捕获时间
重新捕获时间是确定在正常的工作期间所有 GPS 信号出现短暂阻断后, 重新获得导航定位所需的时间。实现阻断信号的方法有很多种,两种最常见的方法是在馈线中插入一个至少60 dB 的衰减器或者直接断开仿真器到接收机的馈线来衰减信号。测量数据与 TTFF 测量数据相似。
测试方法是首先启动矢量信号源上的GPS 仿真。接着启动GPS 接收机进行定位。之后断开GPS接收机输入端的GPS信号(射频电缆),以仿真信号的短暂阻断。最后再重新连接信号。重新捕获时间是重新连接GPS信号和第一次从仿真获得有效的导航数据点的时间间隔。测试至少应收集50个重新捕获的有效采样,然后分析这些采样的平均值、最小值和最大值,再计算出标准偏差。
静态导航精度
静态导航精度是确定接收机定位仿真位置的精度。在此项测试中,静态 (非移动) 场景用作 GPS 仿真信号。测试方法是首先启动矢量信号源上的 GPS 仿真。接着启动 GPS 接收机进行定位。典型的 GPS 测评软件提供位置确定信息。这些数据 (通常为经度、纬度和高度信息) 可以转换成地心固地笛卡尔坐标 (ECEF),用于测评仿真位置与 GPS 接收机计算的置。参见图 3 的典型定位信息。
接收机灵敏度
接收机灵敏度主要确定 GPS 接收机在最低极限信噪比条件下的工作能力,有 2 种测试方法,分别是单星法和定位法
单星法可以测量 GPS 接收机获取 GPS 卫星信号的精确的功率电平,测试方法是首先启动矢量信号源上的GPS 仿真,设置可视卫星的数量应为 1。设置矢量信号源的功率电平精确反映出单个卫星信号的总功率,以便GPS 接收机可以识别单一 GPS 卫星信号。然后降低 GPS卫星信号的功率电平,直到 GPS 接收机无法跟踪这颗卫星。收集此时功率电平和相应的 GPS 接收机 C/No比 数据。单星法测试速度快,配置简便,测试成本较低,除了研发测试外,更多地应用在生产测试中定位法测试 GPS 接收机灵敏度测试是在丢失 3D 定位时,测量功率电平和 C/No 比电平。这需要仿真至少 4 颗卫星的 GPS 信号。在此项测试中,首先启动矢量信号源上的 GPS 仿真。接着启动 GPS 接收机进行定位。然后降低矢量信号源 GPS 信号的功率电平,直到丢失 3D 定位。再次记录下功率电平和相应 GPS 接收机 C/No 比数据。
射频干扰
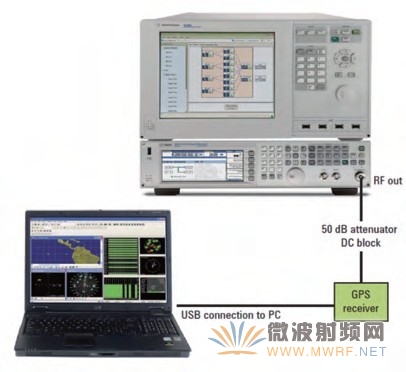
射频干扰是确定 GPS 接收机在输入端接收到干扰信号时保持正常工作的能力。在此项测试中,干扰信号功率电平以 1 dB 的幅度递增,直到 GPS 接收机的性能出现明显衰减。这种干扰通常是由于一颗呈抛物线运动的卫星所造成。干扰信号功率电平缓慢增加,直到 GPS 接收机丢失其 3D 导航定位。参见图 4 的测试设置。

图四
针对车载 GPS 接收机的主要测试
由于汽车移动的特点,针对车载 GPS 接收机应该增加移动场景定位测试和多径衰落场景定位测试
移动场景定位测试
移动场景定位测试是确定 GPS 接收机在一定移动速度和移动轨迹条件下定位的能力。在此项测试中,动态移动场景用作 GPS 仿真信号。
测试方法是首先启动矢量信号源上的 GPS 仿真,启动动态移动场景,设置一定的移动轨迹,连续运行仿真。接着启动 GPS 接收机进行定位。典型的 GPS 测评软件提供位置确定信息。这些数据 (通常为经度、纬度和高度信息) 可以转换成地心固地笛卡尔坐标 (ECEF),用于测评仿真位置与 GPS 接收机计算的位置的偏差,同时测量移动速度的精度,还可以通过地图查看移动轨迹是否正确。参见图的典型移动轨迹信息。

图五
多径衰落场景定位测试
多径衰落场景定位测试是确定 GPS 接收机在多径衰落条件下的工作能力。由于汽车移动在变换的环境中,大多数场景中存在多径传播,其中主路径是卫星直线传播的信号,称为 LOS 信号,即 Line of Sight,其他接收信号则是同一信号经过折射或反射等作用后的信号,比如建筑物或山的影响。多径传播引起问题主要是由于不同路径的无线电信号到达接收机的时间不同,因为各路径经历的长度不同,长的路径时间延迟大。多径传播会造成时延扩散,严重时会降低 GPS 接收机的定位精度,影响首次锁定时间 TTFF,重新锁定时间等这项测试要求矢量信号源的 GPS 仿真通道数大于需要模拟的卫星数量,并利用多个仿真通道模拟卫星信号的多径传播效应,如图6所示。

图六
车载 GPS 接收机测试方案
N5106A 配置 N 7 1 0 9 A 可以完全覆盖以上的车载 GPS 接收机测试要求。除了要求的测试功能外,还提供下列灵活的功能:
● 模拟静态和动态 GPS 接收环境
● 模拟多径传播效应
● 调整卫星可见性,可以部分或完整关闭卫星信号
● 可以实时开启和关闭单个卫星信号
● 可以实时调整单个卫星信号的功率电平
● Ionospheric and tropospheric modeling capability
● 可以调整卫星信号播放起始点时间
● 可以产生需要位置的静态或动态移动场景文件
● 可以在移动场景文件输入 NMEA 模式
● 提供编辑卫星传播通道功能
● 可以在改变功率,时延或多普勒频移条件下测试 GPS跟踪能力
● 支持 A-GPS 测试
● 支持产生其他各种标准无线通信信号
图七
 粤公网安备 44030902003195号
粤公网安备 44030902003195号