概觀
從波音 747 客機的導航操作、汽車駕駛每天都會使用的 GPS 導航系統,到尋寶者要找到深藏於森林某處的寶藏,GPS 技術已經迅速融入於多種應用中。
正當創新技術不斷提升 GPS 接收器效能的同時,相關的技術特性亦越來越完整。時至今日,軟體甚至可建立 GPS 波形,以精確模擬實際的訊號。除此之外,儀器匯流排技術亦不斷提升,目前即可透過 PXI 儀控功能,以記錄並播放即時的 GPS 訊號。
目錄
- 介紹
- GPS 導航系統介紹
- 設定 GPS 量測系統
- GPS 量測技術
- 敏感度 (Sensitivity) 量測作業介紹
- 多組衛星的 GPS 接收器量測
- 結論
介紹
由於 GPS 技術已於一般商用市場逐漸普及,因此多項設計均著眼於提升相關特性,如:
1) 降低耗電量
2) 可尋找微弱的衛星訊號
3) 較快的擷取次數
4) 更精確的定位功能
透過此應用說明,將可了解進行多項 GPS 接收器量測的方法:敏感度、雜訊係數、定位精確度、首次定位時間,與位置誤差。此篇技術文件是要能讓工程師徹底了解 GPS 的量測技術。對剛開始接觸 GPS 接收器量測作業的工程師來說,可對常見的量測作業略知一二。若工程師已具有 GPS 量測的相關經驗,亦可透過此篇技術文件初步了解新的儀控技術。此篇應用說明將分為下列數個段落:
- GPS 技術的基礎
- GPS 量測系統
- 常見量測概述
- 敏感度
- 首次定位時間 (TTFF)
- 定位精確度與重複性
- 追蹤精確度與重複性
每個段落均將提供數項實作秘訣與技巧。更重要的是,讀者可將自己的結果與 GPS 接收器獲得的結果進行比較。透過自己的結果、接收器的結果,再搭配理論量測的結果,即可進一步檢視自己的量測資料。
GPS 導航系統介紹
全球定位系統 (GPS) 為空間架構的無線電導航系統,本由美國空軍所研發。雖然 GPS 原是開發做為軍事定位系統之用,卻也對民間產生重要影響。事實上,您目前就可能在車輛、船舶,甚至行動電話中使用 GPS 接收器。GPS 導航系統包含由 24 組衛星,均以 L1 與 L2 頻帶 (Band) 進行多重訊號的傳輸。透過 1.57542 GHz 的 L1 頻帶,各組衛星均產生 1.023 Mchips BPSK (二進制相位鍵移) 的展頻訊號。展頻序列則使用稱為 C/A (coarse acquisition) 碼的虛擬亂數 (PN) 序列。雖然展頻序列為 1.023 Mchips,但實際的訊號資料傳輸率為 50 Hz [1]。在系統的原始佈署作業中,一般 GPS 接收器可達 20 ~ 30 公尺以上的精確度誤差。此種誤差肇因於美國軍方依安全理由所附加的隨機時脈誤差所致。然而,此稱為選擇性可靠度 (Selective availability) 誤差訊號源,已於 2000 年 5 月 2 日取消。在今天,接收器的最大誤差不超過 5 公尺,而一般誤差已降至 1 ~ 2 公尺。
不論是 L1 或 L2 (1.2276 GHz) 頻帶,GPS 衛星均會產生所謂的「P 碼」附屬訊號。此訊號為 10.23 Mbps BPSK 的調變訊號,亦使用 PN 序列做為展頻碼。軍方即透過 P 碼的傳輸,進行更精確的定位作業。在 L1 頻帶中,P 碼是透過 C/A 碼進行反相位 (Out of phase) 的 90 度傳輸,以確保可於相同載波上測得此 2 種訊號碼 [2]。P 碼於 L1 頻帶中可達 -163 dBW 的訊號功率;於 L2 頻帶中可達 -166 dBW。相對來說,若在地球表面的 C/A 碼,則可於 L1 頻帶中達到最小 -160 dBW的廣播功率。
GPS 導航訊號
針對 C/A 碼來說,導航訊號是由資料的 25 個框架(Frame) 所構成,而每個框架則包含 1500 個位元 [2]。此外,每組框架均可分為 5 組 300 個位元的子框架。當接收器擷取 C/A 碼時,將耗費 6 秒鐘擷取 1 個子框架,亦即 1 個框架必須耗費 30 秒鐘。請注意,其實某些較為深入的量測作業,才有可能真正花費 30 秒鐘以擷取完整框架;我們將於稍後討論之。事實上,30 秒鐘僅為擷取完整框架的平均最短時間;系統的首次定位時間 (TTFF) 往往超過 30 秒鐘。
為了進行定位作業,大多數的接收器均必須更新衛星星曆 (Almanac) 與星曆表 (Ephemeris) 的資訊。該筆資訊均包含於人造衛星所傳輸的訊號資料中,,而每個子框架亦包含專屬的資訊集。一般來說,我們可透過子框架的類別,進而辨識出其中所包含的資訊 [2][7]:
Sub-frame 1:包含時序修正 (Clock correction)、精確度,與人造衛星的運作情形
Sub-frame 2-3:包含精確的軌道參數,可計算衛星的確實位置
Sub-frames 4-5:包含粗略的衛星軌道資料、時序修正,與運作資訊。
而接收器必須透過衛星星曆與星曆表的資訊,才能夠進行定位作業。一旦得到各組衛星的確實距離,則高階 GPS 接收器將透過簡單的三角運算式 (Triangulation algorithm) 回傳位置資訊。事實上,若能整合虛擬距離 (Pseudorange) 與衛星位置的資訊,將可讓接收器精確識別其位置。
不論是使用 C/A 碼或 P 碼,接收器均可追蹤最多 4 組人造衛星,進行 3D 定位。追蹤人造衛星的過程極為複雜,不過簡單來說,即是接收器將透過每組衛星的距離,估算出自己的位置。由於訊號是以光速 (c),或為 299,792,458 m/s 行進,因此接收器可透過下列等式計算出與人造衛星之間的距離,即稱為「虛擬距離 (Pseudorange)」:
![]()
等式 1.「虛擬距離 (Psedorange)」為時間間隔 (Time interval) 的函式 [1][4]
接收器必須將衛星所傳送的訊號資料進行解碼,才能夠獲得定位資訊。每個衛星均針對其位置進行廣播 (Broadcasting),接收器跟著透過每組衛星之間的虛擬距離差異,以決定自己的確實位置 [8]。接收器所使用的三角量測法 (Triangulation),可由 3 組衛星進行 2D 定位;4 組衛星則可進行 3D 定位。
設定 GPS 量測系統
測試 GPS 接收器的主要產品,為 1 組可模擬 GPS 訊號的 RF 向量訊號產生器。在此應用說明中,讀者將可了解應如何使用 NI PXI-5671 與 NI PXIe-5672 RF 向量訊號產生器,以達到量測目的。此產品並可搭配 NI GPS 工具組,以模擬 1 ~ 12 組 GPS 人造衛星。
完整的 GPS 量測系統亦應包含多種不同配件,以達最佳效能。舉例來說,外接的固定式衰減器 (Attenuator),可提升功率精確度與雜訊層 (Noise floor) 的效能。此外,根據接收器是否支援其直接輸入埠的 DC 偏壓 (Bias),某些接收器亦可能需要 DC 阻絕器 (Blocker)。下圖即為 GPS 訊號產生的完整系統:
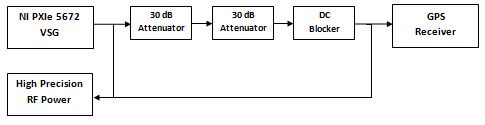
圖 1. GPS 產生系統的程式圖
如圖 1 所示,當測試 GPS 接收器時,往往採用最高 60 dB 的外接 RF 衰減 (留白,Padding)。固定式衰減器至少可提供量測系統 2 項優點。首先,固定式衰減器可確保測試激發的雜訊層低於 -174 dBm/Hz 的熱雜訊層 (Thermal noise floor)。其次,由於可透過高精確度 RF 功率計 (Power meter) 校準訊號準位,因此固定式衰減器亦可提升功率精確度。雖然僅需 20 dB 的衰減即可符合雜訊層的要求,但若使用 60 ~ 70 dB 的衰減,則可達到更高的功率精確度與雜訊層效能。稍後將接著討論 RF 功率校準,而圖 2 搶先說明衰減對雜訊層效能所造成的影響。

圖 2. 不同衰減所需的儀器功率比較
如圖 2 所示,衰減可用於減弱雜訊,而不僅限於 -174 dBm/Hz 的熱雜訊層。
RF 向量訊號產生器
當選擇 RF 向量訊號產生器時,NI LabVIEW GPS 工具組可同時支援 NI PXI-5671 與 NI PXIe-5672 RF 向量訊號產生器。雖然此 2 款介面卡可產生 GPS 訊號,但由於 PCI Express 匯流排速度較快,並可立刻進行 IF 等化 (Equalization),因此 NI PXIe-5672 向量訊號產生器較受到青睞。此 2 款介面卡均具有 6 MB/s 總資料傳輸率與 1.5 MS/s (IQ) 取樣率,可從磁碟串流 GPS 波形。
雖然 PXI控制器硬碟可輕鬆維持此資料傳輸率,NI 仍建議使用外接磁碟進行額外的儲存容量。下圖為包含 NI PXIe-5672 的常見 PXI 系統:

圖 3. 包含 NI PXIe 5672 VSG 與 NI PXI-5661 VSA 的 PXI 系統
GPS 工具組可於完整導航訊號期間,建立最長 12.5 分鐘 (25 個框架) 的波形。依 6 MB/s 的取樣率,則最大檔案約為 7.5 GB。由於上述的波形檔案尺寸,所有的波形均可儲存於多款硬碟選項之一。這些波形儲存資源選項包含:
- PXI 控制器的硬碟 (推薦使用 120 GB 硬碟升級)
- 如 HDD 8263 與 HDD 8264 的外接 RAID 裝置
- 外接 USB 2.0 硬碟 (已透過 Western Digital Passport 硬碟進行測試)
上述各種硬碟設定,均可支援超過 20 MB/s 的連續資料串流作業。因此,任何儲存選項均可模擬 GPS 訊號,並進行記錄與播放。在稍後的段落中,將說明模擬與記錄 GPS 波形的整合作業,並進行 GPS 接收器效能的特性參數描述 (Characterization) 作業。
建立模擬的 GPS 訊號
由於 GPS 接收器是透過天線傳輸資料,並取得衛星星曆與星曆資訊;當然,模擬的 GPS 訊號亦需要該項資訊。衛星星曆與星曆資訊,均透過文字檔案表示,可提供衛星位置、衛星高度、機器狀態,與繞行軌道的相關資訊。此外,在建立波形的過程中M,亦必須選擇客制參數,如星期時間 (TOW)、位置 (經度、緯度、高度),與模擬的接收器速率。以此資訊為基礎,工具組將自動選擇最多 12 組人造衛星、計算所有的都卜勒位移 (Doppler shift) 與虛擬距離 (Pseudorange) 資訊,並接著產生所需的基頻波形。為了可儘快入門,工具組安裝程式亦包含範例的衛星星曆與星曆檔案。此外,更可由下列網站直接下載:
- Almanac information (The Navigation Center of Excellence) http://navcen.uscg.gov/gps/almanacs.htm
- Ephemeris information (NASA Goddard Space Flight Center) http://cddis.gsfc.nasa.gov/gnss_datasum.html#brdc
透過客制的衛星星曆與星曆檔案,即可建立特定日期與時間的 GPS 訊號,甚至可回溯數年以前。請注意,當選擇這些檔案時,必須選擇與日期相對應的檔案。一般來說,衛星星曆與星曆資訊為每日更新,因此當選擇特定時間與日期時,亦應選擇同 1 天的檔案。下載的星曆檔案往往為壓縮的「*.Z」格式。因此,在搭配使用 GPS 工具組之前,檔案必須先行解壓縮。
只要使用工具組中的「自動模式 (Automatic mode)」,即可囊括大多數的 GPS 模組作業,並可透過程式設計的方式,計算都卜勒與隨機距離資訊;當然,此功能亦提供手動模式。在手動模式 (Manual mode) 中,使用者可個別指定每組人造衛星的資訊。圖 4 即顯示此 2 種作業模式所提供的輸入參數。
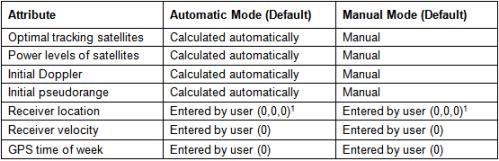
1LLA (longitude, latitude, altitude)
圖 4. GPS 工具組自動與手動模式的預設值
請注意,工具組將根據所指定的星曆檔案,於可能的數值範圍中強制設定 GPS 的 TOW。因此,若選擇的數值超出該星曆檔案的範圍,工具組將自動設定為最接近的數值並提醒使用者。「niGPS Write Waveform To File」範例程式即可建立 GPS 基頻波形 (自動模式),而其人機介面即如下圖所示。
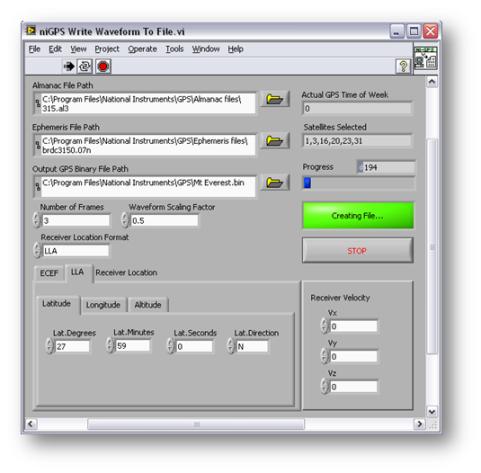
圖 5. 簡單的範例程式即可建立 GPS 測試波形。
請注意,某些特定量測作業,將決定使用者所建立 GPS 測試的檔案類型。舉例來說,當量測接收器敏感度時,將模擬單一人造衛星。另一方面來說,需要定位作業的量測 (如 TTFF 與位置精確度),所使用的 GPS 訊號將模擬多組人造衛星。基於上述需求,NI GPS 工具組所搭配的範例程式,將同時包含單位星與多重衛星模擬功能。
記錄空氣中的 GPS 訊號
建立 GPS 波形時,其獨特又日趨普遍的方式,即是直接從空氣中擷取之。在此測試中,我們使用向量訊號分析器 (如 NI PXI 5661) 記錄訊號,再透過向量訊號產生器 (如 NI PXIe-5672) 產生已記錄的訊號。由於在記錄 GPS 訊號時,亦可擷取實際的訊號減損 (Impairments),因此在播放訊號時,可進一步了解接收器於佈署環境中的作業情形。
只要透過極為直接的方式,即可擷取空氣中的 GPS 訊號。在 RF 記錄系統中,我們將適合的天線與放大器,搭配使用 PXI 向量訊號分析器與硬碟,以擷取最多可達數個小時的連續資料。舉例來說,1 組 2 TB 的 RAID 磁碟陣列,即可記錄最多 25 個小時的 GPS 波形。由於此篇技術文件將不會討論串流的特殊技術,因此若需要相關範例程式碼,請至:http://www.ni.com/streaming/rf。透過下列段落,即可了解應如何針對 RF 記錄與播放系統,設定合適的 RF 前端。
不同類型的無線通訊訊號,均需要不同的頻寬、中央頻率,與增益。以 GPS 訊號來說,基本系統需求是以 1.57542 GHz 的中央頻率,記錄 2.046 MHz 的 RF 頻寬。依此頻寬需求,至少必須達到 2.5 MS/s (1.25 x 2 MHz) 取樣率。注意:此處的 1.25 乘數,是根據 PXI-5661 數位降轉換器 (DDC) 於降頻 (Decimation) 階段的下降 (Roll-off) 濾波器所得出。
在下方說明的測試作業中,我們使用 5 MS/s (20 MB/s) 取樣率以擷取完整的頻寬。由於標準 PXI 控制器硬碟即可達到 20 MB/s 或更高的資料流量,因此不需使用外接的 RAID 亦可將 GPS 訊號串流至磁碟。然而,基於 2 個理由,我們仍建議使用外接硬碟。首先,外接硬碟可提升整體的資料儲存量,並記錄多組波形。其次,外接硬碟不會對 PXI 控制器的硬碟造成額外負擔。在下方說明的測試作業中,我們採用 1 組 USB 2.0 的外接硬碟。此硬碟為 320 GB 的 Western Digital Passport,具有 5400 RPM 的硬碟轉速。在我們的測試作業中,一般讀取速度約落在 25 ~ 28 MB/s。因此該款硬碟可同時用於 GPS 波形資料串流的模擬 (6 MB/s) 與記錄 (20 MB/s) 作業。
GPS 訊號記錄作業最為特殊之處,即是選擇並設定合適的天線與低雜訊放大器 (LNA)。透過一般被動式平面天線 (Passive patch antenna),即可於 L1 GPS 頻帶中發現介於 -120 ~ -110 dBm 的常見峰值功率 (此處為 -116 dBm)。由於 GPS 訊號的功率強度極小,因此必須進行放大作業,以使向量訊號分析器可擷取衛星訊號的完整動態範圍。雖然有多個方法可將合適的增益強度套用至訊號,不過我們發現:若使用主動式 GPS 天線搭配 NI PXI-5690 前置放大器 (Pre-amplifier) 時,即可達到最佳效果。若串聯 2 組各可達 30 dB 增益的 LNA,則總增益則可達到 60 dB (30 + 30)。因此,向量訊號分析器可測得的峰值功率,將從 -116 dBm 提升至 -56 dBm。下圖即為該項設定的範例系統:
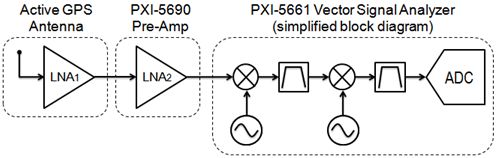
圖 6. GPS 接收器與串聯的 LNA。
請注意,記錄作業系統的必備元件之一,即為主動式 GPS 天線。主動式 (Active) GPS 天線,包含 1 組平面天線與 1 組 LNA。此款天線一般均需要 2.5V ~ 5V 的 DC 偏壓電壓,並僅需約 $20 美金即可購買現成產品。為了簡單起見,我們使用 1 組天線搭配 1 組 SMA 接頭。我們將於下列段落中看到,在 RF 前端的第一組 LNA 雜訊圖形極為重要;該圖形將可確認進行記錄作業的儀控,是否對無線訊號構成最低雜訊。亦請注意,圖 6 中的向量訊號分析器為簡化圖示。實際的 PXI-5661 為 3 階段式超外差 (Super-heterodyne) 向量訊號分析器,較複雜於圖中所示。
若將 60 dB 套用至無線訊號中,則可於 L1 中得到約 -60 ~ -50 dBm 的峰值功率。若以掃頻 (Swept spectrum) 模式設定 VSA 並分析整體頻譜,則亦將發現 L1 頻帶 (FM 與行動電話)之外的帶中功率 (Power in band),其強度將高於 GPS 訊號。然而,帶外 (Out-of-band) 訊號的峰值功率一般均不會超過 -20 dBm,且將透過 VSA 的多組帶通 (Band pass) 濾波器之一進行濾波作業。若要檢視記錄裝置的 RF 前端是否達到應有效率,最簡單的方法之一即為開啟 RFSA 示範面板的範例程式。透過此程式,即可於 L1 GPS 頻帶中呈現 RF 頻譜。圖 7 即為常見的頻譜。請注意,此頻譜截圖是透過 GPS 中心頻率於室外所得。主動式 GPS 天線與 PXI-5690 前置放大器,可達到 60 dB 的總增益。
中心頻率:1.57542 GHz
展頻 (Span):4 MHz
RBW:10 Hz
平均:RMS、20 Averages
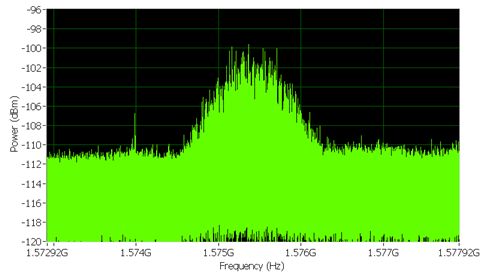
圖 7. 僅透過極小的解析度頻寬 (RBW),才可於頻譜中呈現 GPS
此處使用前面所提到的 RF 記錄與播放 LabVIEW 範例程式;設定 -50 dBm 的參考準位、1.57542 GHz 中央頻率,與 5 MS/s 的 IQ 取樣率。下圖即顯示設定範例的人機介面:
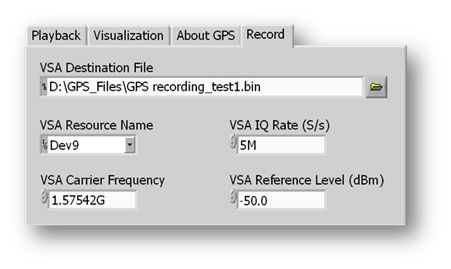
圖 8. RF 記錄與播放範例的人機介面。
GPS 訊號的最長記錄時間,將根據取樣率與最大儲存容量而定。若使用 2 TB 容量的 Raid 磁碟陣列 (Windows XP 所支援的最大磁碟),將可透過 5 MS/s 取樣率記錄最多 25 個小時的訊號。
設定 RF 前端
由於串聯的 LNA 可提供 60 dB 的增益,因此使用者可大幅提升向量訊號分析器前端的功率。在我們的量測作業中,60 dB 的增益即足以將峰值功率從 -116 dBm 提升至 -56 dBm。而透過 60 dB 的增益 (與 1.5 dB 的雜訊係數),訊號的雜訊功率將為 –112 dBm/Hz (-174 + 增益 + F)。因此,所能擷取到的訊噪比 (SNR) 最高可達 56.5 dB (-56 dBm +112.5 dBm),亦低於實際的儀器動態範圍。由此可知,若有 80 dB 的動態範圍,則 VSA 將可記錄最大的 SNR,且不會有無線訊號的雜訊影響。
當要記錄任何無線訊號時,可將參考準位設定高出一般峰值功率至少 5 dB,以因應任何訊號強度的異常現象。在某些情況下,雖然上述此步驟將降低 VSA 的有效動態範圍,但 GPS 訊號卻不會受到影響。由於 GPS 訊號於天線輸入的最大理想 SNR 即為 58 dB (-116 + 174),因此若於 VSA 記錄超過 58 dB 的動態範圍將無任何意義。因此,我們甚至可以「拋棄」儀器的動態範圍達 10 dB 以上,亦不會影響記錄訊號的品質 (在此頻寬中,PXI-5661 將提供優於 75 dB 的動態範圍)。
由於必須設定合適的參考準位,適當設定記錄裝置的 RF 前端亦顯得同樣重要。如先前所提,若要獲得最佳的 RF 記錄資料,則建議使用主動式 GPS 天線。由於主動式天線內建 LNA,以低雜訊係數提供最高 30 dB 的增益,因此亦可供應 DC 偏壓。下方將接著說明多種偏壓方式。
方法 1:以 GPS 接收器進行供電的主動式天線
第一個方法,是以 DC 偏壓「T」供電至主動式天線。在此範例中,我們將 DC 訊號 (此為 3.3 V) 套用至偏壓「T」的DC 埠,且「T」又將合適的 DC 偏移套用至主動式天線。請注意,此處將根據主動式天線的 DC 功率需求,進而決定是否套用精確的 DC 電壓。下圖即說明相關連結情形。
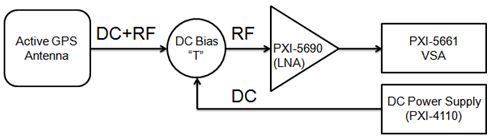
圖 9. 使用 DC 偏壓「T」供電至主動式 GPS 天線
在圖 9 中可發現,PXI-4110 可程式化 DC 電源供應器,即可供應 DC 偏壓訊號。雖然多款現成的電源供應器 (其中亦包含價位較低的電源供應器) 均可用於此應用中,我們還是使用 PXI-4110 以簡化作業。同樣的,現有常見的偏壓器 (Bias tee) 可進行最高 1.58 GHz 的作業,而此處所使用的偏壓器購自於 www.minicircuits.com。
方法 2:以接收器供電至主動式天線
供電至主動式 GPS 天線的第二個方法,即是透過天線本身的接收器。大多數的現成 GPS 接收器,均使用單一連接埠供電至主動式 GPS 天線,且此連接埠亦透過合適的 DC 訊號達到偏壓。若將主動式 GPS 接收器整合分裂器 (Splitter) 與 DC 阻絕器 (Blocker),即可供電至主動式 LNA,並僅記錄 GPS 接收器所獲得的訊號。下圖即為正確的連結方式:
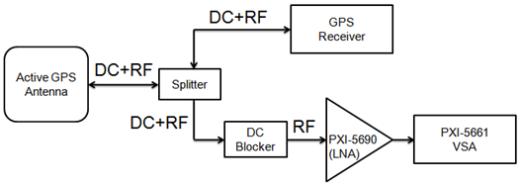
圖 10. 透過 DC 阻絕器 (Blocker),將可記錄並分析 GPS 訊號
如圖 10 所示,GPS 接收器的 DC 偏壓即用以供電至 LNA。請注意,由於當進行記錄時,即可觀察接收器的相關特性,如速度與精確度衰減 (Dilution) 情形,因此方法 2 特別適用於驅動程式測試。
串聯式 (Noise figure) 雜訊係數計算
若要計算已記錄 GPS 訊號的總雜訊量,只要找出整體 RF 前端的雜訊係數即可。就一般情況來說,整組系統的雜訊係數,往往受到系統的第一組放大器所影響。在所有 RF 元件或系統中,雜訊係數均可視為 SNRin 與 SNRout (參閱:量測技術的雜訊係數) 的比例。當記錄 GPS 訊號時,必須先找出整體 RF 前端的雜訊係數。
當執行串聯式雜訊係數計算時,必須先行針對每筆雜訊係數與增益,將之轉換為線性等式;即所謂的「雜訊因數 (Noise factor)」。當以串聯的 RF 元件計算系統的雜訊係數時,即可先找出系統的雜訊因數,並接著轉換為雜訊係數。因此系統的雜訊係數必須使用下列等式計算之:
![]()
等式 2. 串聯式 RF 放大器的雜訊係數計算作業 [3]
請注意,由於雜訊因數 (nf) 與增益 (g) 屬於線性關係而非對數 (Logarithmic) 關係,因此以小寫表示之。下列即為增益與雜訊係數,從線性轉換為對數 (反之亦然) 的等式:
![]()
![]()
![]()
![]()
等式 3 到等式 6. 增益與雜訊係數的線性/對數轉換 [3]
內建低雜訊放大器 (LNA) 的主動式 GPS 天線,一般均提供 30 dB 的增益,且其雜訊係數約為 1.5 dB。在儀控記錄作業的第二階段,則由 NI PXI-5690 提供 30 dB 的附加增益。由於其雜訊係數較高 (5 dB),因此第二組放大器僅將產生極小的雜訊至系統中。在教學實作中,可針對記錄儀控作業的完整 RF 前端,使用等式 2 計算其雜訊因數。增益與雜訊係數值即如下圖所示:

圖 11. RF 前端的首 2 組元件雜訊係數與因數。
根據上列計算,即可找出接收器的整體雜訊因數:
![]()
等式 7. RF 記錄系統的串聯雜訊係數
若要將雜訊因數轉換為雜訊係數 (單位為 dB),則可套用等式 3 以獲得下列結果:
![]()
等式 8. 第一組 LNA 的雜訊係數將影響接收器的雜訊係數
如等式 8 所示,第一組 LNA (1.5 dB) 的雜訊係數,將影響整組量測系統的雜訊係數。透過 VSA 的相關設定,可讓儀器的雜訊水平 (Noise floor) 低於輸入激發的雜訊水平,因此使用者所進行的記錄作業,將僅對無線訊號造成 1.507 dB 的雜訊。
對 GPS 接收器發出訊號
由於多款接收器可使用合適的軟體,讓使用者呈現如經度與緯度的資訊,因此需要更標準化的方式進行自動量測作業。還好,目前有多款接收器均可透過眾所周知的 NMEA-183 協定,以設定對 PXI 控制器發出訊號。如此一來,接收器將可透過序列或 USB 連接線,連續傳送相關指令。在 NI LabVIEW 中,所有的指令均可轉換語法,以回傳衛星與定位資訊。NMEA-183 協定可支援 6 種基本指令,並各自代表專屬的資訊。這些指令即如下表所示:
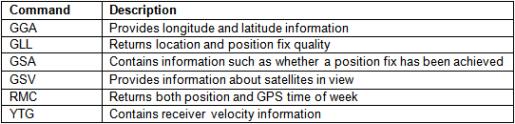
圖 12. 基本 NMEA-183 指令概述
以實際測試需要而言,GGA、GSA,與 GSV 指令應最為實用。更值得一提的是,GSA 指令的資訊可用於了解接收器是否可達到定位作業需要,或可用於首次定位時間 (Time To First Fix,TTFF) 量測。當執行高敏感性的量測時,實際可針對所追蹤的衛星,使用 GSV 指令回傳 C/N (Carrier-to-noise) 比。
雖然無法於此詳細說明 MNEA-183 協定,但可至其他網站尋找所有的指令資訊,如:http://www.gpsinformation.org/dale/nmea.htm#RMC.在 LabVIEW 中,這些指令可透過 NI-VISA 驅動程式轉換其語法。
圖 13. 使用 NMEA-183 協定的 LabVIEW 範例
GPS 量測技術
目前有多種量測作業可為 GPS 接收器的效能進行特性描述 (Characterization),其中亦有數種常見量測可套用至所有的 GPS 接收器中。此章節將說明執行量測的理論與實作,如:敏感度、首次定位時間 (TTFF)、定位精確度/可重複性,與定位追蹤不定性 (Uncertainty)。應注意的是,還有許多不同的方式可檢驗定位精確度,並執行接收器追蹤功能的測試。雖然接著將說明多種基本方式,但仍無法概括所有。
敏感度 (Sensitivity) 量測作業介紹
敏感度為 GPS 接收器功能的最重要量測作業之一。事實上,對多款已量產的 GPS 接收器來說,僅限為最後生產測試所執行的 RF 量測而已。若深入來說,敏感度量測即為「接收器可追蹤並接收上方衛星定位資訊的最低衛星功率強度」。一般人均認為,GPS 接收器必須串聯多組 LNA 以達極高的增益,才能將訊號放大到合適的功率強度。事實上,雖然 LNA 可提升訊號功率,亦可能降低 SNR。因此,當 GPS 訊號的 RF 功率強度降低時,SNR 也將跟著降低,最後讓接收器無法追蹤衛星。
多款 GPS 接收器可指定 2 組敏感值:擷取敏感度 (Acquisition sensitivity) 與訊號追蹤敏感度(Signal tracking sensitivity) [9]。如字面上的意思,擷取敏感度為「接收器可進行定位的最低功率強度」。相反而言,訊號追蹤敏感度為「接收器可追蹤各個衛星的最低功率強度」。
以基本概念而言,我們可將敏感度定義為「無線接收器產生所需最低位元錯誤率 (BER) 的最低功率強度」。由於 BER 與載波雜訊 (Carrier-to-noise,C/N) 比息息相關,因此敏感度一般均是透過已知的接收器輸入功率強度,得出所需的 C/N 值而定。
請注意,各組衛星的 C/N 值,均可直接透過 GPS 接收器的晶片組而得。目前有多種方式可計算出此項數值,而某幾款接收器卻是計算發訊日期 (Message date) 而得出約略值。當透過高功率測試激發進行模擬時,新款 GPS 接收器一般均可得到 54 ~ 56 dB-Hz 的 C/N 峰值。由於即便是萬里無雲的晴空,GPS 接收器亦可能得出 30 ~ 50 dB-Hz 的 C/N 值;因此該 C/N 限值尚屬於正常範圍之內。一般 GPS 接收器均必須達到最小 C/N 比值,才能符合 28 ~ 32 dB-Hz 的定位 (擷取敏感度) 範圍。因此,某些特殊接收器的敏感度可定義為「接收器產生最低定位 C/N 比值所需的最低功率強度」。
理論上來說,單一衛星或多組衛星測試激發均可量測敏感度。而實務上來看,由於已可輕鬆且穩定發出所需的 RF 功率,因此往往是以單一衛星模式進行量測作業。依定義而言,敏感度為接收器回傳最小 C/N 比值的最低功率強度。在接下來的討論中,則可發現接收器的敏感度甚為依賴 RF 前端的雜訊指數 (Noise figure。就數學運算式來看,我們可根據下列等式發現敏感度與接收器雜訊指數之間的關聯性:
![]()
等式 9. 敏感度為 C/N 與雜訊指數所構成的函式。
在等式 9 中,敏感度可表達為 C/N 比值與雜訊指數的函式。舉例來說,定位追蹤所需的最低 C/N 為 32 dB-Hz,則雜訊指數為 2 dB 的接收器將具有 -140 dBm (-174 + 32 + 2) 的敏感度。然而,當單獨測試基頻 (Baseband) 收發器時,往往忽略了第一組 LNA。一般接收器為下圖所示:
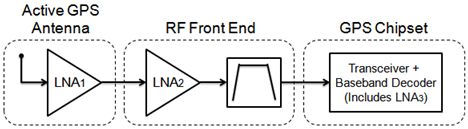
圖 14. GPS 接收器往往串聯多組 LNA [6]
如圖 14 所示,一般 GPS 接收器均是串聯了多組 LNA,為 GPS 訊號提供高效率的增益。如先前所說,第一組 LNA 將決定整組系統的雜訊指數。圖 14 中,我們先假設 LNA1 具有 30 dB 的增益與 1.5 dB 的 NF。此外,我們假設整個 RF 前端具有 40 dB 的增益與 5 dB 的 NF。接著請注意,由於 LNA2 之後的雜訊功率將超過 -174 dBm/Hz 的熱雜訊 (Thermal noise),因此帶通 (Bandpass) 濾波器將同時減弱訊號與雜訊。如此將幾乎不會對 SNR 造成任何影響。最後,我們假設 GPS 晶片組可產生 40 dB 的增益與 5 dB 的雜訊指數。即可計算出整組系統的雜訊指數為:

圖 15. 線性與對數模式的增益與 NF
根據上列計算,即可找出接收器的整體雜訊因數:
![]()
![]()
等式 10 與 11. 第一組 LNA 的雜訊係數將影響接收器的雜訊係數
透過等式 10 與 11 來看,若 GPS 接收器連接已啟動的天線,則其雜訊指數約可達 1.5 dB。請注意,我們已經先忽略了相關雜訊指數等式中的第三項條件。由於此數值極小,基本上可將之忽略。
在某些案例中,GPS 接收器的作業天線會搭配使用內建 LNA。因此測試點將忽略接收器的第一組 LNA。如此一來將透過第二組 LNA 得出雜訊指數,且其往往又大於第一組 LNA 的雜訊指數。若將 LNA1 移除,則可透過下列等式得出 LNA2 的雜訊指數。
![]()
![]()
等式 12 與 13. 移除第一組 LNA 所得到的接收器雜訊指數
如等式 12 與 13 所示,若將具備最佳雜訊指數的 LNA 移除,則將大幅影響整組接收器的雜訊指數。請注意,雖然此「常見」GPS 接收器雜訊指數的計算範例純為理論敘述,但仍具有其重要性。由於接收器所呈現的 C/N 比值,實在與系統的雜訊係數密不可分,因此系統的雜訊係數可協助我們設定合適的 C/N 測試限制。
單一衛星敏感度量測
在了解敏感度量測的基本理論之後,接著將進行實際量測的各個程序。一般測試系統均是透過直接連線,將模擬的 L1 單一衛星載波送入至 DUT 的 RF 通訊埠中。為了獲得 C/N 比值,我們將接收器設定透過 NMEA-183 協定進行通訊。在 LabVIEW 中,則僅需串聯 3 筆 GSV 指令,即可讀取最大的衛星 C/N 值。
根據 GPS 規格說明,單一 L1 衛星若位於地球表面,則其功率應不低於 -130 dBm [7]。然而,消費者對室內與戶外的 GPS 接收器使用需求,已進一步壓低了測試限制。事實上,多款 GPS 接收器可達最低 -142 dBm 定位追蹤敏感度,與最低 -160 dBm 訊號追蹤。在一般作業點 (Operating point) 時,大多數的 GPS 接收器均可迅速持續鎖定低於 6dB 的訊號,因此我們的測試激發則使用 -136dBm 的平均 RF 功率強度。
若要達到最佳的功率精確度與雜訊水平 (Noise floor) 效能,則建議針對 RF 向量訊號產生器的輸出,使用外接衰減。在大多數的案例中,40 dB ~ 60 dB 的外接衰減,可讓我們更接近線性範圍 (功率 ≥ -80 dBm),妥善操作產生器。由於各組接收器的定位衰減 (Fix attenuation) 均不甚固定,因此必須先行校準系統,以決定測試激發的正確功率。
在校準程序中,我們可考量:1) 訊號的峰值平均比 (Peak-to-average ratio)、衰減器各個部分的差異,還有任何接線作業可能的插入損耗 (Insertion loss)。為了校準系統,應先從 DUT 切斷連線,再將該連線接至 RF 向量訊號分析器 (如 PXI-5661)。
Part A:單一衛星校準
當執行敏感度量測時,RF 功率強度的精確性,實為訊號產生器最重要的特性之一。由於接收器可獲得 0 數位精確度的 C/N 值 (如 34 dB-Hz),因此生產測試中的敏感度量測可達 ± 0.5 dB 的功率精確度。因此,必須確保我們的儀控功能至少要達到相等或以上的效能。由於一般 RF 儀控作業是專為大範圍功率強度、頻率範圍,與溫度條件所設計,因此在執行基本系統校準時,量測的可重複性 (Repeatability) 應遠高於特定儀器效能。下列章節將進一步說明可確保 RF 功率精確度的 2 種方法。
方法 1:單一被動式 RF 衰減器:
雖然使用外接衰減,是為了確保 GPS 訊號產生作業可達最佳雜訊密度,但實際僅需 20 dB 的衰減,即可確保雜訊密度低於 -174 dBm/Hz。當使用 20 dB 的固定板 (Pad) 時,僅需將儀器設定為超過 20 dB 的 RF 功率強度即可。為了達到 -136 dBm 的目標,儀器應程式設計為 -115 dBm (假設 1 dB 的連接線插入損耗),且將 20 dB 衰減器直接連至產生器的輸出。則所達到的 RF 功率將為 -136 dBm,但仍具有額外的不確定性。假設 20 dB 的固定板具有 ± 0.25 dB 的不確定性,且 RF 產生器亦於 -116 dBm 具有 ± 1.0 dB 的不確定性,則整體的不確定性將為 ± 1.25 dB。因此,雖然方法 1 最為簡單且不需進行校準,但由於系統中的多項元件均未經過校準,因此可能接著發生不確定性。請注意,造成儀器不確定性最主要的原因之一,即為電壓駐波比 (Voltage standing wave ratio,VSWR)。因為被動式衰減器是直接連至儀器的輸出,所以反射回儀器的駐波即為實際衰減。由於降低了功率的不確定性,因此可提升整體功率的精確性。
請注意,此處亦使用高效能 VNA 確實量測被動衰減器。透過此量測裝置,即可於 ± 0.1 dB 的不確定性之內,決定所要套用的衰減。
方法 2:經過校準的多組被動衰減器
校準 RF 功率的第二種方法,即是使用高精確度的 RF 功率計 (高於 ± 0.2 dB 的精確度,並最低可達 -70 dBm) 搭配多款固定式衰減器。因為我們是以固定頻率,與相對較小的功率範圍操作 RF 產生器,所以可有效修正由產生器造成的任何錯誤。此外,由於被動衰減器是以固定頻率進行線性動作,因此亦可校準其不確定性。在方法 2 中,主要即必須確保產生系統可達到最佳效能,且將不確定性降至最低。此高精確度功率計可達優於 80 dB 的動態範圍 (往往為雙頭式儀器),進而確保最低的量測不確定性。
透過高精確度的功率計,即可使用 3 種量測作業進行系統校準:1 種用於向量訊號產生器的 RF 功率,另外 2 種量測作業可校準衰減器。為了達到最佳的不確定性,則應設定系統所需的最少量測次數。若要達到 -136 dBm 的 RF 功率強度,則可將 RF 儀器程式設計為 -65 dBm 的功率強度,並使用 70 dB 固定衰減 (假設 1 dB 插入損耗)。為了確實進行 RF 功率強度的程式設計作業,則可透過固定的 Padding 校準實際衰減。校準程序如下:
1) 將 VSG 程式設計為+15 dBm 功率強度
可開啟 Measurement and Automation Explorer (MAX) 並使用測試面板。透過測試面板以 +15 dBm 產生 1.58 GHz 連續波 (CW) 訊號。
2) 以高精確度的功率計量測 RF 功率
使用 RF 功率計,讓功率達到儀器功率精確度規格的 +14.78 dBm (或近似值) 之內。
3) 附加 70 dB 固定式衰減器(30 dB + 20 dB + 20 dB) 與任何必要的連接線
4) 以高精確度的功率計量測 RF 功率
將功率計設定為最大平均值 (512),以量測 RF 功率強度。此處的讀數為 -56.63 dBm。
5) 計算 RF 總耗損
若以 +14.78 dBm 減去 -56.63 dBm,即可在整合了衰減器與連接線之後,確保產生 71.41 dB 的功率耗損。請注意,多款衰減器往往具備最高 ± 1.0 dB 的不確定性。因此量測所得的衰減可能最高達 ± 3.0 dB 的變化。所以校準衰減器更顯重要,確保已知衰減可達較低的不確定性。
根據衰減器與連接線的校準常式,即可確定所需的 RF 功率強度必須達到 -136 dBM。基於前述的 71.41 dB 衰減,必須將 RF 向量訊號產生器設定為 -58.59 dBm 的功率強度。若要確認程式設計過後的功率無誤,則可依下列步驟進行:
6) 直接將功率計附加至 RF 向量訊號產生器
並移除所有的衰減器與連接線。
7) 將 RF 產生器設定必要數值,使其最後功率達到-136 dBm。
而程式設計的數值應為 -58.59 dBm,即由 -136 dBm + 71.41 dB 而得。
8) 以功率計量測最後功率。
請注意,所測得的 RF 功率,將因儀器的功率精確度而有所不同。即使測得 -58.59,則實際結果亦將因儀器的不確定性而產生些許變化。
9) 調整產生器功率直到功率計讀出-58.59 dBm
雖然 RF 產生器可於一定的容錯範圍內進行作業,但此數值不僅具有可重複性,亦可調整 RF 功率計進行校準,直到得出合適的數值為止。
透過上述方法,僅需 3 項 RF 功率量測作業,即可決定所需的 RF 功率。因此,假設量測裝置具有 ± 0.2 dB 的不確定性,則可得出 – 136 dBm 的功率不確定性將為 ± 0.6 dBm (3 x 0.2)。
Part B:敏感度量測
現在校準 RF 量測系統的功率之後,接著僅需進行 RF 產生器的程式設計,將功率強度設定足以讓接收器回傳最小的 C/N。雖然用於量測敏感度的 RF 功率將因接收器而有所不同,但是接收器 C/N 與 RF 功率的比值,將呈現完美的線性關係。在我們的測試中,可假設所需的 C/N 為 28 dB-Hz 以進行定位。透過等式 12,即可得出接收器 C/N 比值與雜訊指數之間的關係。
![]()
等式 14. C/N 做為雜訊指數與衛星功率的函式
假設衛星功率穩定,則可發現由接收器回報的 C/N 比,幾乎就等於接收器的雜訊指數函式。下表顯示可達到的多樣 C/N 比值。

圖 16. C/N 為雜訊指數的函式
一般來說,接收器上的 GPS 解碼晶片組,將得出定位作業所需的最小 C/N 比值。然而,又必須透過整組接收器的雜訊指數,才能決定目前功率強度所能達到的 C/N 比值。因此,當量測敏感度時,必須先了解定位作業所需的最小 C/N 比值。
其實有多種方法可量測敏感度。如上表所示,RF 功率與敏感度具有直接相關性。因此,可根據現有的敏感度功率強度,量測接收器的 C/N 比值;亦可根據不同的 RF 功率強度,得出系統敏感度。
為了說明這點,則可注意 RF 訊號功率與 GPS 接收器 C/N 比值,在不同功率強度之下的關係。下方量測作業所套用的激發,即忽略了第一組 LNA 而進行,且接收器的整體雜訊指數約為 8 dB。而圖 17 顯示相關結果。
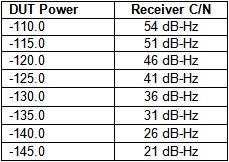
圖 17. 接收器的 C/N 比值為 RF 功率的函式
如圖 17 所示,此量測範例的 RF 功率與 C/N 比值,幾乎是呈現完整的線性關係。而若使用高輸入功率模擬 C/N 比值,將產生例外情況;接收器報表將出現可能的最大 C/N 值。然而,因為在任何條件下,進行實驗的晶片組均不會產生超過 54 dB-Hz 的 C/N 值,所以這些結果均屬預期範圍之中。
根據圖 7 中所示 RF 功率與敏感度之間的線性關係,其實僅需針對接收器模擬不同的功率強度,即可進行 GPS 接收器的生產測試作業。若接收器在 -142 dBm 得出 28 dB-Hz 的 C/N 值,則亦可於 -136 dBm 得到 34 dB-Hz 的 C/N 值。若特別注重量測速度,則可使用較高的 C/N 值,再從結果中推斷出敏感度的資訊。
找出雜訊指數
又根據等式 13 與 14,搭配相關載噪比 (Carrier-to-noise ratio),則可得出接收器或晶片組的雜訊指數。亦如下方等式 15 所示。
![]()
等式 15. 接收器雜訊指數為功率與 C/N 比值所構成的函式。
而由圖 17 所示,接收器的雜訊指數將直接與 RF 功率強度與載噪比互成比例。根據此關係,我們僅需針對 RF 功率強度與 C/N 進行關聯性,即可量測晶片組的雜訊指數。而此項量測中請注意,應以 0.1 dB 為單位增加產生器的功率。由於 NMEA-183 協定所得到的衛星 C/N 值,是以最接近的小數位為準,因此在量測接收器 C/N 比值時,應估算雜訊指數達 1 位數的精確度。範例結果如圖 18 所示。
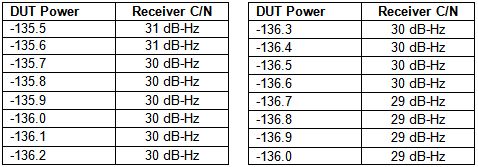
圖 18. DUT 功率與接收器 C/N 的關聯。
如圖 18 所示,若 RF 功率強度處於 -136.6 dBm ~ -135.7 dBm 之間,則其 C/N 比值將維持於 30 dB-Hz。若以捨入法計算 NMEA-183 的資料時,則幾乎可確定 -136.1 dBm 功率強度將產生 30.0 dB-Hz 的 C/N 比值無誤。透過等式 14,晶片組的雜訊指數則為 -174.0 dBm + -136.1 dBm + 30.0 dB-Hz = 7.9 dB。請注意,此計算是根據 2 組不確定性係數而進行:向量訊號產生器的功率不確定性,還有接收器所產生的 C/N 不確定性。
多組衛星的 GPS 接收器量測
敏感度量測需要單一衛星激發,而有多項接收器量測需要可模擬多組衛星的單一測試激發。更進一步來說,如首次定位時間 (TTFF)、定位精確度,與精確度降低 (Dilution of precision) 的量測作業,均需要接收器進行定位。由於接收器需要至少 4 組衛星進行 3D 定位作業,因此這些量測將較敏感度量測來得耗時。也因此,多項定位量測作業均於檢驗與校準作業中進行,而非生產測試時才執行。
此章節將說明可為接收器提供多組衛星訊號的方法。在討論 GPS 模擬作業時,亦將讓使用者了解 TTFF 與定位精確度量測的執行方法。若是討論 RF 記錄與播放作業,將一併說明應如何在多項環境條件下,校準接收器的效能。
量測首次定位時間 (TTFF) 與定位精確度
首次定位時間 (TTFF) 與定位精確度量測,為設計 GPS 接收器的首要檢驗作業。若您已將多種消費性的 GPS 應用了然於胸,即應知道接收器回傳其實際位置所需的時間,將大幅影響接收器的用途。此外,接收器回報其位置的精確度亦甚為重要。
為了讓接收器可進行定位,則應透過導航訊息 (Navigation message) 下載星曆與年曆資訊。由於接收器下載完整 GPS 框架必須耗費 30 秒,因此「冷開機 (Cold start)」的 TTFF 狀態則需要 30 ~ 60 秒。事實上,多款接收器可指定數種 TTFF 狀態。最常見的為:
冷開機 (Cold Start):接收器必須下載年曆與星曆資訊,才能進行定位。由於必須從各組衛星下載至少 1 組 GPS 框架 (Frame),因此大多數的接收器在冷開機狀態下,將於 30 ~ 60 秒時進行定位。
暖開機 (Warm Start):接收器的年曆資訊尚未超過 1 個星期,且不需要其他星曆資訊。一般來說,此接收器可於 20 秒內得知目前時間,並可進行 100 公里內的定位 [2]。大多數暖開機狀態的 GPS 接收器,可於 60 秒內進行定位,有時甚至僅需更短的時間。
熱開機 (Hot Start):接收器具備最新的年曆與星曆資訊時,即為熱開機狀態。接收器僅需取得各組衛星的時序資訊,即可開始回傳定位位置。大多數熱開機狀態的 GPS 接收器,僅需 0.5 ~ 20 秒即可開始定位作業。
在大部分的情況下,TTFF 與定位精確度均與特定功率強度相關。值得注意的是,若能於多種情況下檢驗此 2 種規格的精確度,其實極具有其資訊價值。因為 GPS 衛星每 12 個小時即繞行地球 1 圈,所以可用範圍內的衛星訊號隨時都在變化,也讓接收器可在不同的狀態下回傳正確結果。
下列章節將說明應如何使用 2 筆資料來源,以執行 TTFF 與定位精確度的量測,包含:
1) 接收器在其佈署環境中,透過天線所獲得的即時資料
2) 透過空中傳遞所記錄的 RF 訊號,並將之用以測試接收器所記錄的資料
3) 當記錄即時資料後,RF 產生器用於模擬星期時間 (Time-of-week,TOW) 所得的模擬資料用此 3 筆不同的資料來源測試接收器,可讓各個資料來源的量測作業均具備可重複特性,且均相互具備相關性。
量測設定
若要獲得最佳結果,則所選擇的記錄位置,應讓衛星不致受到周遭建築物的阻礙。我們選擇 6 層樓停車場的頂樓進行測試,以無建物覆蓋的屋頂儘可能接觸多組衛星訊號。透過 GPS 晶片組的多個開機模式,均可執行 TTFF 量測作業。以 SIRFstarIII 晶片組為例,即可重設接收器的出廠、冷開機、暖開機,與熱開機模式。下方所示即為接收器執行相關測試的結果。
若要量測水平定位的精確度,則必須根據經、緯度資訊進而了解相關錯誤。由於這些指數均以「度」表示,因此可透過下列等式轉換之:
![]()
等式 16. 計算 GPS 的定位錯誤
請注意該等式中的 111,325 公尺 (111.325 公里),即等於地球圓周的 1 度 (共 360 度)。此指數是根據地球圓周 360 x 111.325 km = 40.077 km 而來。
Off-The-Air GPS
以「Off-the-air」方式量測接收器的 TTFF 時,即是將接收器直接連至天線達到最不精確的方式。由於此量測作業可針對已記錄與模擬的 GPS 訊號,進而校準自動化量測作業,因此亦具有一定的重要性。除此之外,亦可針對 SIRFstar III 晶片組進行程式設計,讓接收器進入冷開機模式,且以接收器所得到的 TTFF 值進行所有量測作業。請注意,GPS 接收器一般指定為 32.6 秒的冷開機 TTFF 時間。在我們的量測作業中,則得到下列結果:
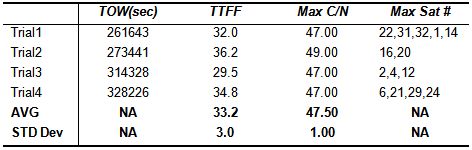
圖 19.「Off-the-air」GPS 訊號的 TTFF 與最大 C/N 比值
根據初始的 「Off-the-air」結果,則可發現 GPS 接收器在標準的 3 秒誤差內,可達到 33.2 秒的 TTFF。這些量測結果均位於 TTFF 規格的容錯範圍內。而更重要的,即是可透過模擬與記錄的 GPS 資料,進而比較量測結果與實際結果。
根據上列線性誤差等式,即可計算各次量測的線性標準誤差。
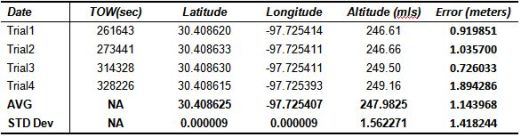
圖 20. 由「Off-the-air」GPS 訊號所得的 LLA
請注意,若要將「Off-the-air」GPS 訊號、模擬訊號,與播放訊號進行相關,則必須先進行「Off-the-air」訊號功率的相關性。當進行 TTFF 與定位精確度量測時,RF 功率強度基本上不太會影響到結果。因此,必須比對「Off-the-air」、模擬,與記錄 GPS 訊號的 C/N 比值,即可進行 RF 功率的相關性作業。
已記錄的 GPS 訊號
雖然可透過即時訊號量測 TTFF 與定位誤差,但是這些量測作業往往不可重複;如同衛星均持續環繞地球運行,而非固定不動。進行可重複 TTFF 與定位精確度的量測方式之一,即是使用已記錄的 GPS 訊號。此章節將接著說明應如何透過已記錄的 GPS 訊號,以進行即時 GPS 訊號的相關作業。
已記錄的 GPS 訊號,可透過 RF 向量訊號產生器再次產生。由於必須播放訊號,則校準 RF 功率強度最簡單的方法,即是比對即時與記錄的 C/N 值。當獲得「Off-the-air」訊號時,則可發現所有即時訊號的 C/N 峰值均約為 47 ~ 49 dB-Hz 之間。
而播放訊號的功率強度,亦可達到與即時訊號相同的 C/N 值,進而確定其所得的 TTFF 與位置精確度,將可與即時訊號產生相關。在下圖 21 中,我們使用的星期時間 (TOW) 值與即時「Off-the-air」訊號的 TOW 相近,而在 4 次不同的實驗下得到 TTFF 結果。
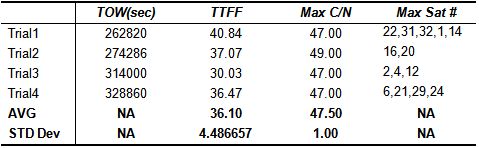
圖 21. 由「Off-the-air」GPS 訊號所得的 TTFF
除了量測首次定位時間之外,亦可量測 GPS 接收器所取得的經度、緯度,與高度資訊。下圖顯示相關結果。
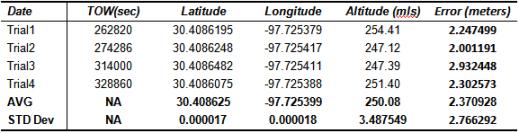
圖 22. 由「Off-the-air」GPS 訊號所得的 LLA
從圖 21 與 22 中可注意到,其實透過已記錄的 GPS 訊號,即可得到合理的可重複 TTFF 與 LLA (Latitude、Longitude、Altitude) 結果。然而,由於這些量測作業的錯誤與標準誤差,僅稍微高於「Off-the-air」量測的誤差,因此幾乎可將之忽略。因為絕對精確度 (Absolute accuracy) 較高,所以可重複性亦較優於「Off-the-air」量測作業。
模擬的 GPS 訊號
最後 1 種可進行 TTFF 與定位精確度量測的 GPS 測試訊號來源,即為模擬的多組衛星 GPS 訊號。透過 NI LabVIEW GPS 工具組,即可透過由使用者定義的 TOW、星期數,與接收器位置,模擬最多 12 組衛星。此 GPS 訊號模擬方式的主要優點,即是透過可能的最佳訊噪比 (SNR) 構成 GPS 訊號。與即時/記錄的 GPS 訊號不同,依此種方法所建立的可重複訊號,其雜訊功率甚小。圖 23 即呈現了模擬多組衛星訊號的頻域。
VSA 設定
Center: 1.57542 GHZz
Span: 4 MHz
RBW: 100 Hz
Averaging: RMS, 20 Average
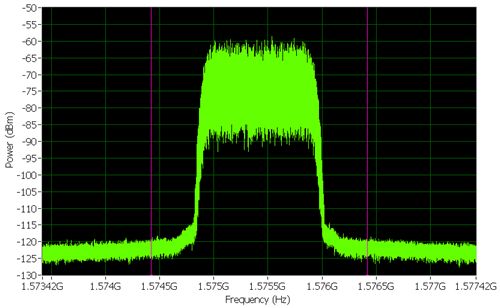
圖 23. 模擬多組衛星 GPS 訊號的帶內功率 (Power-in-band) 量測作業
當透過模擬的多組衛星波形測試接收器時,則可針對接收器所提供的 C/N 比值進行關聯,以再次評估所需的 RF 功率。
一旦能為 RF 功率強度進行關聯,則可接著量測 TTFF。當量測 TTFF 時,應先啟動 RF 向量訊號產生器。過了 5 秒鐘之後,可手動將接收器轉為「冷」開機模式。一旦接收器取得定位資訊,則將回報 TTFF 資訊。下圖則呈現模擬 GPS 訊號的相關結果:
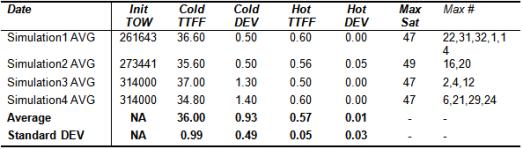
圖 24. TTFF 數值的 4 項專屬模擬
請注意圖 24 中的所有模擬作業均使用相同的 LLA (Latitudes、Longitude,與 Altitude)。
此外,若要量測 TTFF,我們亦可依不同的 TOW 建立模擬作業,以計算 LLA 的精確度與可重複性。請注意,由於在數個小時之內,可用的衛星訊號將持續變化,因此必須設定多種 TOW 以測試精確度 (如圖 24)。而圖 25 則表示其 LLA 資訊。

圖 25. 多項 TOW 模擬作業的水平精確度
在圖 25 中,可根據模擬的定位,計算出公尺為單位的水平錯誤。又如圖 20 所示,可透過下列等式找出錯誤:
![]()
等式 17. 模擬 GPS 訊號的定位錯誤
而針對我們所使用的接收器而言,其水平定位最大誤差為 5.2 公尺,水平定位平均誤差為 1.5 公尺。而透過圖 18 所示,我們所使用的接收器均可達指定的限制之內。
如先前所述,接收器的精確度,與可用的衛星訊號密不可分。也就是說,接收器的精確度可能在數個小時內大幅變化 (衛星訊號改變),但是其可重複性卻極小。為了確認我們的 GPS 接收器亦為如此,則可針對特定的模擬 GPS 波形執行多項測試。此項作業主要是必須確認,RF 儀控並不會對模擬的 GPS 訊號產生額外的不確定性。如下方圖 26 所示,當重複使用相同的二進制檔案時,我們所使用的 GPS 接收器將得到極高可重複性的量測。
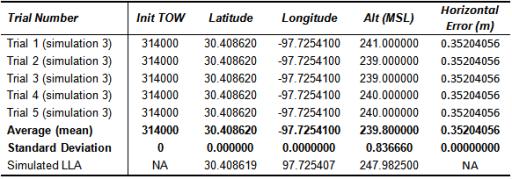
圖 26. 相同波形的各次測試,其誤差亦具有極高的可重複性
回頭再看圖 20,使用模擬 GPS 訊號的最大優點之一,即是可達到可重複的定位結果。由於此特性可讓我們確認:所回報的定位資訊,並不會因為設計迭代 (Iteration) 而發生變化,因此在開發的設計檢驗階段中,此特性格外重要。
量測動態定位精確度
GPS 接收器測試的最後 1 種方法,即是量測接收器的追蹤功能,使其在大範圍的功率強度與速度中維持定位。在過去,此種測試 (往往亦為功能測試) 的常見方法之一,即是整合驅動測試與多路徑衰減 (Multi-path fading) 模擬。在驅動測試 (Drive test) 中,我們使用可導入大量訊號減損 (Impairment) 的已知路徑,驅動原型接收器。由於驅動測試是將自然減損套用至 GPS 衛星訊號的簡單方法,因此這些量測往往亦不可重複。事實上,如GPS 衛星移動、天氣條件的變化,甚至年度時間 (Time of year) 的因素,均可影響接收器的效能。
因此,目前有 1 種逐漸普及的方法,即是於驅動測試上記錄 GPS 訊號,以大量訊號減損檢驗接收器效能。若要進一步了解設定 GPS 記錄系統的方法,請參閱前述章節。而在驅動測試方案中,有多款 PXI 機箱可供選擇。最簡單的方式,即是使用 DC 機箱並以汽車電池進行供電。其次可使用標準的 AC 機箱,搭配轉換器即可使用汽車電池供電。在此 2 種選項中,DC 機箱的耗電量較低,但亦較難以於實驗室中供電。如下列所示的標準 AC 機箱使用結果,其所供電的系統則包含 1 組外接的車用電池,與 1 組 DC to AC 轉換器。
一旦我們完成 GPS 訊號的記錄作業,即可透過相同的測試資料重複測試接收器。在下方的說明中,我們追蹤接收器的經度、緯度,與速度。透過序列埠與每秒 1 次的 NMEA-183 指令讀取速率,從接收器讀取所需的資料。在下方量測中,我們所呈現的接收器特性參數,僅有定位與衛星 C/N 值。請注意,在執行這些量測作業的同時,亦可分析其他資訊。雖然下列結果中並未量測水平精確度衰減 (Horizontal dilution of precision,HDOP),但此特性參數亦可提供大量的接收器定位精確度資訊。
若要獲得最佳結果,則應確實同步化接收器與 RF 產生作業的指令介面。下方所示結果中,我們將 COM 埠 (pin 2) 的資料通道做為開始觸發器,以針對RF 向量訊號產生器與 GPS 模組進行同步化。此同步化方式僅需任意波形產生器的 1 個時脈循環 (100 MS/s),即可進行向量訊號產生器與 GPS 接收器的同步化。因此最大的歪曲 (Skew) 應為 10 µS。並請注意,因為我們將取得接收器的經緯度,所以由同步化作業所造成的精確度錯誤,將為 10µs 乘以 Max Velocity (m/s),或為 0.15 mm。
使用上述的設定,我們即可按時取得接收器的經緯度。結果即如下圖所示:

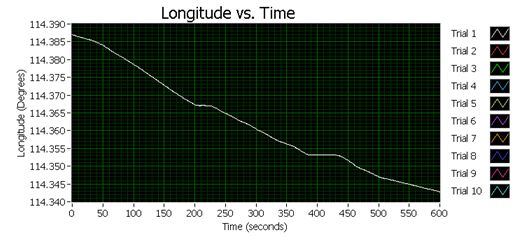
圖 27 與 28. 每 4 分鐘所得到的接收器經緯度
在圖 27 與 28 所呈現的資料中,即使用已記錄的驅動測試訊號,取得統計、定位,與速度的相關資訊。此外我們可觀察到,在每次的測試之間,此項資訊具有相對的可重複性;即為每個獨立軌跡所呈現的差異。事實上,這就是我們最需要的接收器可重複性 (Repeatability)。由於可重複性資訊將可預估 GPS 接收器精確度的變化情形,因此我們亦可計算波形各個樣本之間的標準誤差。在圖 29 中,我們在各次同步化取樣作業之間,繪出標準的定位誤差 (相對於平均位置)。

圖 29. 依時間取得的經度與緯度標準誤差
當看到水平標準誤差時,可注意到標準誤差在 120 秒時快速增加。為了進一步了解此現象,我們亦根據接收器的速度 (m/s) 與 C/N 值的 Proxy,繪出總水平標準誤差。而我們預先假設:在沒有高功率衛星的條件下,衛星的 C/N 比值僅將影響接收器。因此,我們針對接收器所回傳 4 組最高高度的衛星,平均其 C/N 比值而繪出另 1 組 C/N 的 Proxy。結果即如下列圖 30 所示。
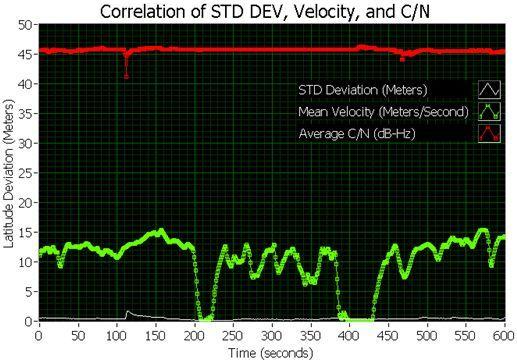
圖 30. 定位精確度與 C/N 值的相關性
如圖 30 所示,在 120 秒時所發生的峰值水平錯誤 (標準誤差中),即與衛星的 C/N 值產生直接關聯,而與接收器的速度無關。此次取樣的標準誤差約為 2 公尺,且已低於其他取樣約 10 公尺的誤差。同時,我們可發現前 4 名的 C/N 平均值,由將近 45 dB-Hz 驟降至 41 dB-Hz。
上述的測試不僅說明 C/N 比值對定位精確度的影響,亦說明了已記錄 GPS 資料所能進行的分析作業種類。在此測試中的 GPS 訊號驅動記錄作業,是在中國深圳 (Shenzhen) 北方的惠州市 (Huizhou) 所進行。並接著於德州奧斯汀 (Austin Texas) 測試實際的接收器。
結論
如整篇文件所看到的,目前已有多項技術可測試 GPS 接收器。雖然如敏感度的基本量測,最常用於生產測試中,但是此量測技術亦可用於檢驗接收器的效能。這些測試技術雖然各有變化,但是均可於單一 PXI 系統中全數完成。事實上,GPS 接收器均可透過模擬或記錄的基頻 (Baseband) 波形進行測試。透過整合的方式,工程師可執行完整的 GPS 接收器功能測試:從敏感度到追蹤其可重複性。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号