作者: Philip Karantzalis,高级应用工程师和Frances De La Rama,产品应用工程师
问题:
为何要组合使用低通滤波器(LPF)和模数转换器(ADC)驱动器?

答案:
为了减小模拟信号链的尺寸,降低其成本,并提供ADC抗混叠保护(ADC采样频率周围频段中的ADC输入信号不受数字滤波器保护,必须由模拟低通滤波器(LPF)进行衰减)。20 V p-p LPF驱动器一般用于工业、科技和医疗(ISM)设备中,该设备必须使用具有更低满量程输入的高速ADC对传统的20 V p-p信号范围进行数字化处理。
简介
通过驱动ADC实现优化的混合信号性能,这是一大设计挑战。图1所示为标准的驱动器ADC电路。在ADC采集期间,采样电容将反冲RC滤波器中指数衰减的电压和电流。混合信号ADC驱动器电路的最佳性能受到多个变量影响。驱动器的建立时间、RC滤波器的时间常数、驱动阻抗,以及ADC采样电容的反冲电流在采样时间内相互作用,导致产生采样误差。采样误差随着ADC位数、输入频率和采样频率的增大而增大。
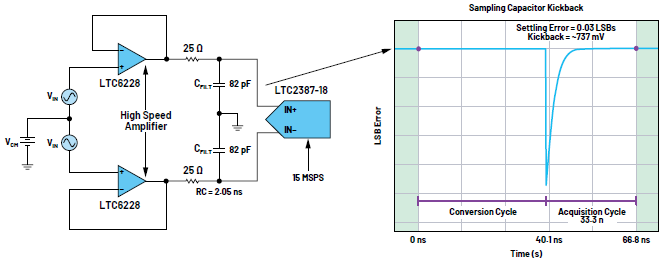
图1.标准ADC驱动器和RC滤波器。
标准ADC驱动器具有大量实验数据样本,可用于可靠的设计流程。但缺乏实验数据来引导进行驱动ADC的低通滤波器设计。本文介绍集成模拟低通滤波、信号压缩和ADC驱动器的LPF驱动器电路(参见图2)。
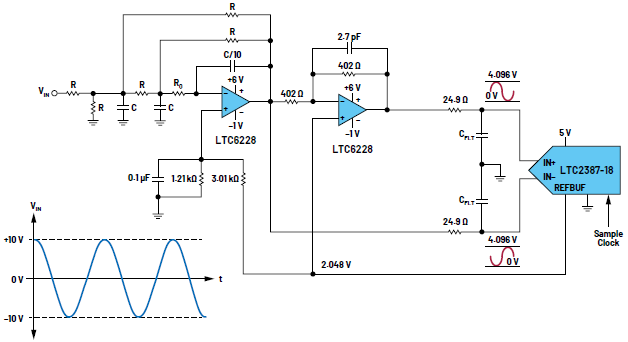
图2.LPF驱动器和ADC电路。
表1列出了图2所示电路的性能变量。下方的实验室数据和分析旨在引导说明,给出图2所示的电路的时间和频率响应限值。
表1.图2所示电路的性能变量
|
LPF驱动器 |
RC滤波器 |
ADC |
|
–3 dB带宽、阻带衰减、建立时间、噪声、THD |
电阻值、RC时间常数 |
采样频率、位数、采样时间、SNR、THD |
实验室数据和分析
信噪比(SNR)和总谐波失真(THD)是衡量系统动态性能的两个重要参数。能否实现最佳性能,取决于ADC和信号调理级的组合,在本文中,后者包括三阶低通滤波器和单端至差分转换器。图2所示的LPF驱动器电路的–3 dB带宽和建立时间会有所不同,有关SNR和THD的测量值,请参见表2至表5。本文将会探讨受测变量和这些变量对系统性能的影响。
低通滤波器–3 dB带宽
比较信号带宽为1 MHz与2 MHz和0.5 MHz时系统的性能。当–3 dB点分别为558 kHz、1 MHz、和2.3 MHz,其性能如表2所示。将截止频率降低至558 kHz,LPF噪声带宽随之降低,但SNR提高。将截止频率增大至1 MHz或2.3 MHz,LPF驱动器建立时间缩短,THD降低。
表2.R = 750 Ω时三种截止频率对应的LPF驱动器性能
|
VIN (V p-p) |
FIN (kHz) |
-3 dB频率 |
RQ |
LPF |
LPF |
SNR |
THD |
|
|
|
558 kHz |
|
2700 pF |
|
90 dB |
-98 dB |
|
20 |
2 |
1 MHz |
150 Ω |
1500 pF |
750 Ω |
90 dB |
-103 dB |
|
|
|
2.21 MHz |
|
680 pF |
|
88 dB |
-106 dB |
更改图2所示的R或C可以更改截止频率。使用C电容来设置截止频率时,LPF驱动器THD更低;R电阻值降低,有助于略微改善SNR;如表3所示。
表3.R = 412 Ω时三种截止频率对应的LPF驱动器性能
|
VIN (V p-p) |
FIN (kHz) |
-3 dB频率 |
RQ |
LPF |
LPF |
SNR |
THD |
|
|
|
580 kHz |
|
4700 pF |
|
91 dB |
-98 dB |
|
20 |
2 |
1 MHz |
150 Ω |
2700 pF |
412 Ω |
90 dB |
-97 dB |
|
|
|
2.25 MHz |
|
1200 pF |
|
89 dB |
-99 dB |
设置RQ电阻(图2)
LPF的RQ电阻可设置时间响应。RQ越高,过冲越大,建立时间越长。RQ越低,过冲越小,建立时间越短。图3显示使用150 Ω和75 Ω RQ电阻时对应的LPF瞬态响应。我们测试了使用不同的RQ时LPF驱动器的性能,测试结果如表4所示。
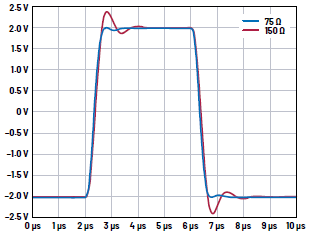
图3.不同的RQ值对应的过冲和建立时间。
表4.不同的RQ值对应的LPF驱动器性能
|
VIN (V p-p) |
采样速率(MSPS) |
-3 dB频率 |
RQ |
LPF |
LPF |
SNR |
THD |
|
20 |
10 |
558 kHz |
150 Ω |
2700 pF |
750 Ω |
90 dB |
-98 dB |
|
75 Ω |
90 dB |
-97 dB |
|||||
|
1 MHz |
150 Ω |
1500 pF |
89 dB |
-102 dB |
|||
|
75 Ω |
89 dB |
-100 dB |
|||||
|
2.3 MHz |
150 Ω |
680 pF |
88 dB |
-106 dB |
|||
|
75 Ω |
88 dB |
-106 dB |
根据实际测量得出的数据,使用75 Ω和150 Ω RQ对SNR和THD性能没有明显影响,只是影响过冲和建立时间的一个因素。
ADC采样速率
表5中的数据显示,如果使用LTC2387-18,在10 MSPS时系统的THD性能低于15 MSPS时(在10 MSPS时,图2中的RC驱动器电容C3和C4的值为180 pF)。
注:在10 MSPS时,LTC2387-18和LTC2386-18的采样时间分别为61 ns和50 ns。
表5.采样速率为10 MSPS和15 MSPS时的LPF驱动器性能
|
VIN (V p-p) |
采样速率(MSPS) |
-3 dB频率 |
RQ |
LPF |
LPF |
SNR |
THD |
|
20 |
15 |
1 MHz |
150 Ω |
1500 pF |
750 Ω |
88 dB |
-96 dB |
|
10 |
89 dB |
-101 dB |
|||||
|
15 |
2.3 MHz |
75 Ω |
680 pF |
88 dB |
-93 dB |
||
|
10 |
88 dB |
-106 dB |
RC滤波器
驱动器和ADC之间的RC滤波器用于限制带宽,确保实现宽带宽低噪声,且实现更优的信噪比。RC数值决定–3 dB截止频率。降低R有时可能导致响铃振荡和不稳定。增大R会增大采样误差。使用更低的C值,会导致更高的电荷反冲,但充电时间更快。使用更高的C值,可以降低电荷反冲,但充电时间会变慢。此外,设置RC值是确保在给定的采样时间内获取稳定样本的关键。使用数据手册的推荐值和精密ADC驱动器工具给出的建议值会是一个非常不错的起点。
精密ADC驱动器工具是一款综合工具,可以帮助预测在驱动器和ADC之间使用不同的RC值系统的性能。可以使用这款工具检查的参数包括电荷反冲、采样误差和采样时间。
使用25 Ω和180 pF RC实现更低的–3 dB截止频率时,输入信号建立时间和电荷反冲会受到影响。要实现更低的–3 dB截止频率,并确保输入信号在采集时间内正确建立,我们可能需要使用更低的采样速率。根据LTC2387-18数据手册,采样时间通常是周期时间减去39 ns。在15 MSPS使用LTC2387-18时,采样时间为27.67 ns,在10 MSPS使用此器件时,采样时间为61 ns。
借助精密ADC驱动器工具,图4a至4c汇总列出了使用不同的RC值时对应的反冲差值和RC时间常数(Tau),以及采样速率为10 MSPS和15 MSPS时的采样时间。图4a显示LTC2387-18在15 MSPS采样速率下,使用推荐RC值(25 Ω和82 pF)时的建立响应。图4b显示在C为180 pF时,得出的RC时间常数更高,这导致在15 MSPS采样速率、27.6 ns采样时间内输入信号无法建立。图4c使用与图4b相同的RC值(25 Ω和180 pF),但在使用10 MSPS采样速率、采样时间增加至61 ns之后,信号能够建立。
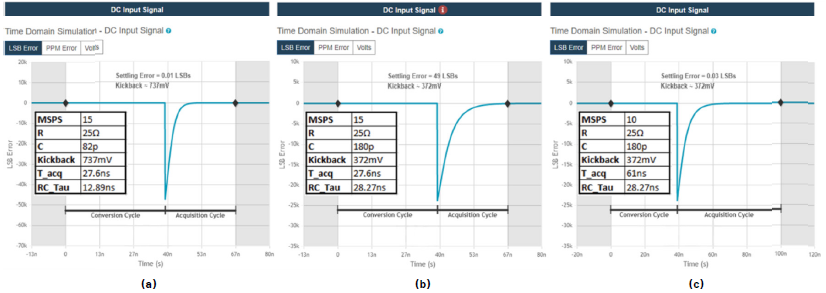
图4.使用不同采样速率时的电荷反冲、RC_Tau、采样时间:(a) 15 MSPS采样速率,LTC2387-18使用建议的RC值(25 Ω和82 pF),(b) 15 MSPS采样速率,LTC2386-18使用建议的RC值(25 Ω和180 pF),(c) 10 MSPS采样速率,LTC2386-18使用建议的RC值(25 Ω和180 pF)。
LPF驱动器电阻选择
可以通过更改R或C来实现LPF驱动器的–3 dB截止频率。电阻噪声是系统总噪声的组成部分。根据噪声计算公式,从理论上来说,降低电阻值可以降低电阻噪声。为了进行验证,我们尝试了两个不同的电阻值作为LPF驱动器R,分别是750 Ω和412 Ω。从理论来说,R更低时得出的SNR应该更佳,但从实际获得的数据来看,如表2和表3所示,SNR并无很大改善,相反,这会对THD性能产生更大影响。
LPF电阻(图1中的R)越低,放大器所需的电流越大。使用更低的电阻值时,运算放大器的输出电流高于最大线性驱动电流。
放大器驱动器选择
在选择要使用的ADC驱动器时,实现器件最佳性能所对应的规格至关重要。我们使用两个ADC驱动器来收集数据,分别是ADA4899-1和LTC6228。这些ADC驱动器非常适合用于驱动LTC2387-18,后者用于进行实验室测量。在选择ADC驱动器时考虑的一些规格包括带宽、电压噪声、谐波失真和电流驱动能力。根据已完成的测试,从THD和SNR这两个方面来看,ADA4899-1和LTC6228的性能差异可以忽略。
LPF设计和应用指南
图5显示LPF电路。5个相同电阻(R1至R5)、1个用于调节LPF时间响应的电阻(RQ)、2个相同的接地电容(C1和C2),以及1个数值为接地电容1/10的反馈电容(C3),这些器件构成了LPF无源组件(±1%电阻和±5%电容)。
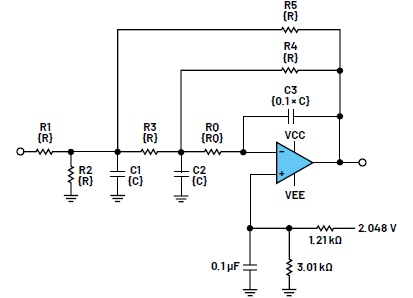
图5.LPF电路。
简单的LPF设计流程(注1)
R1至R5 = R,C1和C2 = C。
要尽量降低失真,电阻R1至R5的值必须在600 Ω至750 Ω范围内。
▪ 设置R = 750 Ω
▪ C = 1.5E9/f3 dB(最接近标准的5%电容pF),f3 dB为LPF –3 dB频率(注2)
▪ 例如:如果f3 dB为1 MHz,那么C = (1.5E9)/(1E6) = 1500 pF
▪ C3 = C/10
▪ RQ = R/5或R/10(注3和4)
注1.简单的滤波器设计只需要一个计算器,无需使用非线性s域公式。
注2.如果R = 619 Ω,那么C = 1.8E9/f3 dB,f3 dB为LPF –3 dB频率。
注3.RQ = R/5,用于实现最大阻带衰减,RQ = R/10,用于实现低过冲和快速建立时间。
采用RQ/5和RQ/10时,在10× f–3 dB时,阻带衰减分别为–70 dB和–62 dB。
注4.如果RQ = R/10,–3 dB频率比RQ = R/5时低7%,也就是说,R1至R5等于RQ/5时R的0.93。
注5.LPF驱动器差分输出至ADC输入的PCB线路距离为1'’或更低。
注6.LPF运算放大器的VCC和VEE分别为6 V和–1 V,输出线性电压摆幅为0 V至4.098 V。
结论
根据表2至表5的SNR和THD数据,我们可以了解图2所示电路的性能。通过增大电容来降低LPF带宽,这会增大SNR(降低LPF噪声带宽)。LPF带宽越低,失真程度越高(因为LPF建立时间比实现最低采样误差所需的时间长)。此外,如果LPF电阻值太低,THD会随之降低,因为LPF运算放大器需要驱动反馈电阻和反相运算放大器输入电阻(运算放大器输出电流更高时,失真程度降低)。
LTC2387-18 ADC采用10 MSPS采样频率时,LPF通带必须为1 MHz或高于1 MHz,以尽可能降低THD。将LPF设置为1 MHz,是对SNR、THD和足量ADC混叠抑制的任意妥协。
设计参考:ADI的精密ADC驱动器工具
精选器件
运算放大器
|
产品型号 |
VOS (V)最大值 |
IBIAS (A)最大值 |
GBP (Hz)典型值 |
VNOISE (V/√Hz)典型值 |
THD 2 V p-p,RL = 1k |
VS范围最小值/最大值(V) |
|
ADA4899-1 |
35 µV |
-12 µA |
600 MHz |
1 nV/√Hz |
-117 dBc |
±5 V |
|
LTC6228/ LTC6229 |
20 µV |
-16 µA |
890 MHz |
0.88 nV/√Hz |
-120 dBc |
±5 V |
模数转换器
|
产品型号 |
分辨率 |
最大值FS |
输入类型 |
VIN范围 |
SNR |
INL |
数据输出接口 |
|
LTC2387 |
18 |
15 MSPS |
单端、差分 |
–VREFBUF至+VREFBUF |
95.7 |
±0.6 |
串行LVDS接口 |
致谢
主要顾问:
混合信号部门的高级应用工程师Guy Hoover和Clarence Mayott。
精密ADC驱动器工具设计师Anne Mahaffey
关于ADI公司
Analog Devices, Inc. (NASDAQ: ADI)是全球领先的半导体公司,致力于在现实世界与数字世界之间架起桥梁,以实现智能边缘领域的突破性创新。ADI提供结合模拟、数字和软件技术的解决方案,推动数字化工厂、汽车和数字医疗等领域的持续发展,应对气候变化挑战,并建立人与世界万物的可靠互联。ADI公司2022财年收入超过120亿美元,全球员工2.4万余人。携手全球12.5万家客户,ADI助力创新者不断超越一切可能。更多信息,请访问www.analog.com/cn
 粤公网安备 44030902003195号
粤公网安备 44030902003195号