据有关部门统计,在所有的商用车交通事故中,有41%的事故是侧面碰撞事故,这些事故造成30%以上的人员伤亡和财产损失。所以,解决商用车的侧面安全问题非常紧迫、非常重要。顺禾公司新开发的微波盲点检测和变道辅助系统可以很好地解决车辆侧后方盲区问题,提前预警潜在的危险,避免交通事故的发生,提升驾驶的安全性能。
1、微波变道辅助系统简介
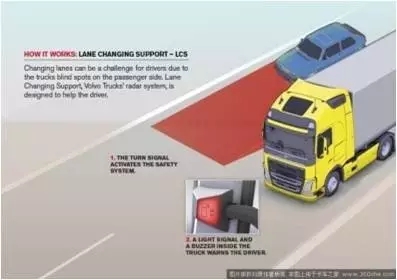
变道辅助系统LCA(ISO17387标准上称为“变道策略辅助系统LCDAS”, 简称“变道辅助”),是通过雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测;获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断;最终以声、光等方式提醒驾驶员;让驾驶员掌握最佳变道时机,防止变道引发的交通事故;同时对后方碰撞也有比较好的预防作用。
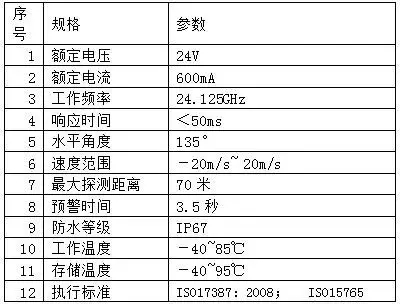
由于技术成熟度和成本的原因,这里只介绍24GHZ微波雷达技术的变道决策辅助系统。这套系统使用2颗24GHZ微波雷达作为传感器,对车辆侧方和后方进行探测;探测距离70米,相对速度20米/秒(即72Km/H);这样可以提前3.5秒把潜在的危险信息告知驾驶员,让驾驶员有足够的反映时间,从而防止事故的发生。
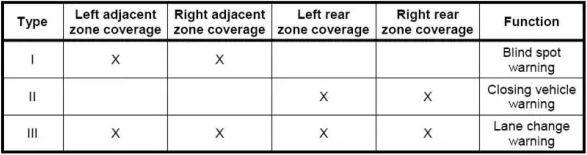
变道辅助系统包括“盲点监测”、“接近车辆预警”、“变道预警”3个功能。可以有效地防止后方追尾、变道、转弯等交通事故的发生;极大提升汽车后方的安全性能。
| 序号 | 功能类别 | 功能描述 |
| 1 | 盲点监测BSD | 根据其判断到的移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险。 |
| 2 | 变道辅助LCA | 系统检测目标车辆在相邻的区域以较大的相对速度靠近本车,在两车时距小于一定范围内时,通过视觉、听觉、或触觉等方式提醒驾驶员 |
| 3 | 后碰预警RCW | 系统检测到同一车道后方有快速接近的移动物体,并有碰撞风险时,及时通过闪烁制动灯等方式,提醒后方车辆的驾驶员,在有碰撞风险的情况下,及时预警乘员安全带等方式减小碰撞带来的伤害。 |
2、技术原理
2.1、微波雷达原理
微波是指波长在1~10mm的电磁波,其带宽大,分辨率高,天线部件尺寸小,能适应恶劣环境。雷达天线向外发出一系列调频连续波FMCW,频率随时间按调制电压的规律变化,一般是连续的三角波,发射与接收信号如图1所示。图中实线是发射信号,虚线是相对静止和相对运动物体的反射信号。反射与发射信号波形相同,只是差一个延时时间t. t=2R/C (1); 此公式中,R为目标距离,C为光速。
发射信号与反射信号在某一时刻的频差即为混频输出的中频频率f(b).相对运动物体的反射信号由于多普勒效应的原因,会产生频率的移动。在三角波的上升沿与下降沿输出的中频频率分别为f(b+)、f(b-).以下公式成立:从而得到目标车辆的距离R与相对运动速度V。f(b)的确定主要是通过对信号的频谱进行分析;一般是通过傅里叶变换(FFT)对信号的时域和频域进行变换分析。
FMCW发射及回波信号

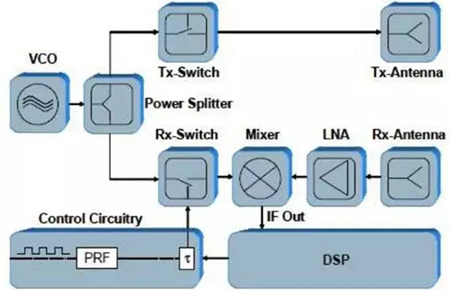
2.2、微波雷达结构
微波雷达主要包括:天线、收发模块、信号处理模块和报警模块。射频收发前端是雷达系统的核心部件。一个典型的射频前端主要包括天线、线性VCO、放大器、平衡混频器。前端混频输出的中频信号经过中频放大送至后级数据处理部分。
数据处理部分需要消除不必要的信号(如杂波)和干扰信号,并对经过中频放大的混频信号进行处理,从信号频谱中提取目标距离和速度等信息。
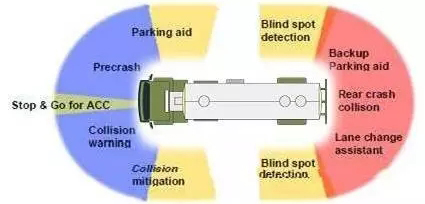
2.3、微波雷达的应用
24GHz微波雷达可以实现盲点检测、车道偏离预警、后方碰撞预警、泊车辅助、前方防撞等多种功能。
3、技术特点
微波雷达技术与其它技术,比如视频、激光、红外线技术相比,其主要优点就是不易受天气影响,探测数据主要与目标的位置和速度有关。微波雷达可以探测目标物体的距离、相对速度、角度等信息;可以很容易识别目标物体的相对位置,从而虑除干扰,保证目标物体识别的有效性和报警的准确性。通过安装微波雷达,可以给汽车提供全方位的保护。
3.1、规格参数
4、测试标准及方法
微波变道辅助系统测试包括 功能测试、电气性能测试、电磁兼容性测试、可靠性测试、装车实测等6步。由于电气性能测试、电磁兼容性测试、可靠性测试是汽车电子产品的通用性标准。这里不再介绍。这里重点介绍微波雷达变道辅助系统的功能测试。
4.1、测试准备:
对汽车周围区域作如下分割:
A:距离车尾30米;B:距离车尾3米;
C:驾驶员头部位置;
D:车头部位;
N:车尾部位;
E:车身左侧;
J:车身右侧;
F:左侧第1条车道线;
G:左侧第2条车道线;
H:左侧第3条车道线;
K:右侧第1条车道线;
L:右侧第2条车道线;
M:右侧第3条车道线;

4.2、盲点监测测试标准和要求:
对于BCFG和BCKL组成的矩形区域为盲区;此区域内若有快速接近的车辆(行人等),应该报警。
4.3、接近车辆预警 标准和要求:
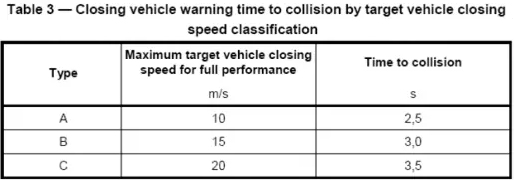
对于相邻车道FG和KL,盲区B之后的区域为接近区域。此区域的测试标准分3个等级:
A级:要能测到速度大于10m/s的接近车辆(行人等),预警时间大于2.5秒;B级:要能测到速度大于15m/s的接近车辆(行人等),预警时间大于3.0秒;
C级:要能测到速度大于20m/s的接近车辆(行人等),预警时间大于3.5秒;
5、市场趋势
早在1973年德国的AEG-Telefunken和Bosch公司共同开始研究汽车防撞雷达技术,并研制出了35GHz的非相关脉冲雷达。随着微波技术的成熟,通过传感器检测汽车周边环境以避免事故的想法又重新被汽车制造商关注。我国亦有100多个大学、研究所、工厂开始研究微波。现在,微波基础元件和系统已具备工程应用的技术条件,特别是微波器件的模块化、微波单片集成电路(MMIC)工艺上的进展和突破,使微波器件能以被接受的价格提供批量产品。截止2016年底,海拉公司出货的24GHz微波雷达已超过1000万只。
自从德国奔驰汽车公司1999年在S级高级轿车上面安装自主巡航控制系统(ACC)以来,越来越多的公司和供应商投入到微波雷达系统研制、器件开发、和算法研究当中。国际上主要的微波雷达供应商有博世、法雷奥、海拉、西门子、德尔福等。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号