еҲ©з”Ёйӣ·иҫҫжһҒеҢ–жөӢйҮҸпјҢжҠ‘еҲ¶жө·жқӮжіў
жө·дәӢйӣ·иҫҫжҳҜе…Ёзҗғе•ҶдёҡгҖҒиҝҗиҫ“е’ҢеӣҪйҳІзҡ„е…ій”®з»„жҲҗйғЁеҲҶгҖӮе’ҢжүҖжңүйӣ·иҫҫдёҖж ·пјҢдј ж„ҹеҷЁеҸ‘е°„е®ҡеҗ‘з”өзЈҒжіўиғҪйҮҸпјҢ然еҗҺжөӢйҮҸдёҺйӣ·иҫҫеңәжҷҜдёӯзҡ„зү©дҪ“зӣёдә’дҪңз”ЁеҗҺеҶҚиҫҗе°„еӣһдј ж„ҹеҷЁзҡ„жҺҘ收еӨ©зәҝдёӯзҡ„иғҪйҮҸгҖӮ
жө·жҙӢзҺҜеўғдёӢзҡ„жқӮжіўжңҖйҮҚиҰҒжқҘжәҗжҳҜжө·жҙӢжң¬иә«пјҢд№ҹе°ұжҳҜеӨ§е®¶жүҖзҹҘйҒ“зҡ„“жө·жқӮжіў”гҖӮ

з”ұдәҺжө·йқўе…·жңүй«ҳеҠЁжҖҒзү№жҖ§пјҢеҜ№жө·дёҠе’ҢжІҝжө·йӣ·иҫҫзі»з»ҹиҖҢиЁҖпјҢжө·жқӮжіўе°Өе…¶е…·жңүжҢ‘жҲҳжҖ§гҖӮз”өзЈҒжіўд»ҘжҺҘиҝ‘ж°ҙе№ізҡ„е…Ҙе°„и§’дёҺжө·йқўзӣёдә’дҪңз”ЁпјҢеңЁеҰӮжӯӨдҪҺзҡ„жҺ е°„и§’еәҰдёӢпјҢдёәдәҶжҒ’иҷҡиӯҰзҺҮ(CFAR)жЈҖжөӢиҖҢе»әжЁЎзҡ„жө·жқӮжіўз»ҹи®ЎеҲҶеёғдёҚеҶҚйҖӮз”ЁгҖӮ
жө·дёҠйӣ·иҫҫзі»з»ҹи·ҹиёӘзҡ„зӣ®ж ҮеҸҜиғҪиў«жө·жқӮжіўдә§з”ҹзҡ„иҷҡеҒҮиӯҰжҠҘжүҖж·№жІЎпјҢиҖҢеҜјиҮҙж„ҹе…ҙи¶Јзҡ„зӣ®ж ҮеңЁејәжө·жқӮжіўиғҢжҷҜдёӢеҸҜиғҪжЈҖжөӢдёҚеҲ°гҖӮе°Ҫз®Ўж•°еҚҒе№ҙжқҘиҝӣиЎҢдәҶеӨ§йҮҸе°қиҜ•жқҘи®ҫи®ЎдёҖз§Қзј“и§ЈдҪҺжҺ е°„и§’жө·жқӮжіўзҡ„жүӢж®өпјҢдҪҶд»ҘеүҚзҡ„ж–№жі•иҰҒд№ҲеңЁи®Ўз®—дёҠдёҚеҲҮе®һйҷ…пјҢиҰҒд№Ҳзјәд№ҸйІҒжЈ’жҖ§гҖӮ
MITжһ—иӮҜе®һйӘҢе®ӨжӯЈеңЁжҺўзҙўдҪҝз”ЁжһҒеҢ–йӣ·иҫҫжөӢйҮҸжқҘеҮҸиҪ»дҪҺжҺ е°„и§’жө·жқӮжіўеҪұе“Қзҡ„еҸҜиЎҢжҖ§гҖӮ2015е№ҙ10жңҲпјҢз ”з©¶дәәе‘ҳз»„иЈ…дәҶдёҖеҘ—Xжіўж®өе…ЁжһҒеҢ–йӣ·иҫҫзі»з»ҹпјҢ并收йӣҶдәҶйӣ·иҫҫжөӢйҮҸж•°жҚ®гҖӮжүҖеҫ—еҲ°зҡ„ж•°жҚ®йӣҶж¶өзӣ–еҗ„з§ҚжіўеҪўж–№жЎҲгҖҒеёҰе®ҪпјҢжө·еҶөд»ҘеҸҠзӣ®ж ҮзӯүгҖӮ
Polarimetric Co-location Layering, PCL
еҲ©з”Ёиҝҷдәӣж•°жҚ®пјҢз ”з©¶дәәе‘ҳејҖеҸ‘дәҶPCLз®—жі•пјҢе®ғеҸҜд»Ҙж»ӨйҷӨжө·жқӮжіўд»Ҙдҝқз•ҷзӣ®ж ҮеӣһжіўпјҢд»ҺиҖҢеҮҸе°‘иҷҡиӯҰпјҢ并且иғҪеӨҹзӣҙжҺҘйҖӮеә”йӣ·иҫҫеӨ„зҗҶзі»з»ҹгҖӮ
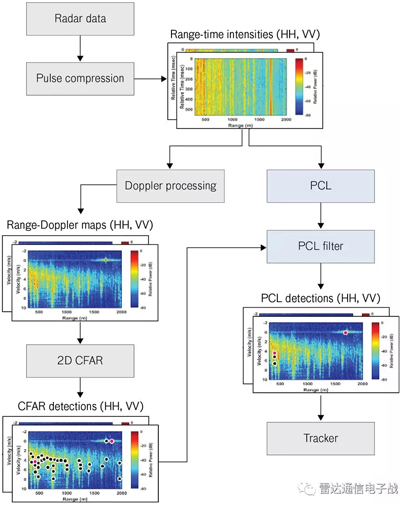
常规йӣ·иҫҫеӨ„зҗҶзі»з»ҹеңЁзӣёе№ІеӨ„зҗҶж—¶й—ҙй—ҙйҡ”(CPI)еҶ…дә§з”ҹдёҖзі»еҲ—и·қзҰ»-еӨҡжҷ®еӢ’еҹҹдёӯзҡ„жЈҖжөӢз»“жһңпјҢжҜҸдёӘCPIзҡ„жЈҖжөӢз»“жһңйғҪдјҡиҫ“е…ҘеҲ°йӣ·иҫҫзҡ„и·ҹиёӘеҷЁдёӯгҖӮи·ҹиёӘеҷЁеҒҮе®ҡжүҖжңүжЈҖжөӢйғҪжҳҜз”ұзӣ®ж Үеј•иө·зҡ„пјҢ并е°қиҜ•е°Ҷдј е…Ҙзҡ„жЈҖжөӢз»“жһңдёҺе…ҲеүҚзҡ„жЈҖжөӢз»“жһңзӣёе…іиҒ”пјҢд»Ҙи·ЁCPIе»әз«Ӣзӣ®ж Үи·ҹиёӘгҖӮ
еңЁдёҖдёӘз»ҷе®ҡзҡ„CPIеҶ…пјҢеҜ№ж°ҙе№іжһҒеҢ–(HH)е’ҢеһӮзӣҙжһҒеҢ–(VV)зҡ„жҜҸдёҖдёӘ“и·қзҰ»-еӨҡжҷ®еӢ’”еҹҹж•°жҚ®иҝӣиЎҢзҡ„дәҢз»ҙCFARжЈҖжөӢз»“жһңпјҢд»ҘеҸҠи·қзҰ»-ж—¶й—ҙе№…еәҰз»“жһңйғҪдјҡ并иЎҢиҫ“е…ҘеҲ°PCLдёӯ(и§ҒдёӢеӣҫ)гҖӮ
PCLе»әз«Ӣзҡ„еҹәжң¬еҺҹзҗҶжҳҜжө·йқўзҡ„еӨҡжҷ®еӢ’йў‘и°ұжҳҜдёҺжһҒеҢ–зӣёе…ізҡ„гҖӮе…·дҪ“жқҘиҜҙпјҢз”ұHHйӣ·иҫҫжөӢйҮҸзҡ„жө·йқўзҡ„е№іеқҮйҖҹеәҰдёҺVVйӣ·иҫҫжөӢйҮҸзҡ„йҖҹеәҰдёҚеҗҢгҖӮд№ҹе°ұжҳҜиҜҙз”ұHHжЈҖжөӢзҡ„жө·жқӮжіўзҡ„йҖҹеәҰеңЁCPIеҶ…дёҺVVжөӢйҮҸзҡ„жө·жқӮжіўзҡ„йҖҹеәҰдёҚеҗҢгҖӮ
дҪҶжҳҜпјҢеҜ№дәҺзӣ®ж ҮжЈҖжөӢжқҘиҜҙ并дёҚжҳҜеҰӮжӯӨгҖӮеҰӮжһңдёҖдёӘзӮ№зӣ®ж ҮеңЁHHе’ҢVVжөӢйҮҸдёӯйғҪжңүдҝЎеҸ·пјҢйӮЈд№ҲиҝҷдёӘзӣ®ж ҮеңЁCPIеҶ…зҡ„дёӨдёӘжһҒеҢ–ж–№еҗ‘дёҠзӣёеҜ№дәҺйӣ·иҫҫзҡ„еҫ„еҗ‘йҖҹеәҰеӨ§иҮҙзӣёеҗҢгҖӮ
PCLз®—жі•еҲ©з”ЁиҝҷдёӘеҺҹзҗҶжқҘж»ӨйҷӨжңҖз»Ҳз»ҷи·ҹиёӘеҷЁзҡ„жЈҖжөӢз»“жһңдёӯзҡ„жө·жқӮжіўеҜјиҮҙзҡ„иҷҡиӯҰгҖӮеңЁжҜҸдёӘCPIдёҠпјҢPCLеҢ…еҗ«д»ҘдёӢ2дёӘжӯҘйӘӨпјҡ
1 е°ҶHHе’ҢVVйҖҡйҒ“еҶ…зҡ„жЈҖжөӢз»“жһңе…іиҒ”иө·жқҘпјӣ
2 зӣ‘жөӢCPIдёӯжЈҖжөӢеҜ№зҡ„дҪҚ移пјҢд»ҘзЎ®е®ҡе“ӘдәӣеҜ№йҡҸзқҖж—¶й—ҙзҡ„еҸҳеҢ–иҖҢдёҖиө·з§»еҠЁгҖӮ
д»Ҙиҝҷз§Қж–№ејҸеҸҜд»ҘеҢәеҲҶдёҚеҗҢзҡ„зү©дҪ“пјҢ并且дёҺжө·жқӮжіўдёҚеҗҢгҖӮPCLе°Ҷз”ұдәҺжө·жқӮжіўйҖ жҲҗзҡ„ж ҮеҮҶCFARиҷҡиӯҰзҺҮйҷҚдҪҺеӨҡиҫҫдёӨдёӘж•°йҮҸзә§пјҢеҗҢж—¶дҝқз•ҷзӣ®ж ҮжЈҖжөӢжҖ§иғҪгҖӮ
з”ұдәҺжө·жқӮжіўдҫқиө–дәҺйӣ·иҫҫжіўй•ҝе’Ңи§ӮжөӢж–№еҗ‘пјҢжһ—иӮҜе®һйӘҢе®Өеӣўйҳҹйў„и®ЎпјҢеҢ…еҗ«еӨҡдёӘжіўж®өе’Ңи§ӮжөӢж–№еҗ‘зҡ„жӣҙе№ҝйҳ”зҡ„ж•°жҚ®ж”¶йӣҶе°ҶдјҡжӣҙеҘҪзҡ„йӘҢиҜҒPCLгҖӮеҜ№дәҺжө·дёҠеә”з”ЁпјҢиғҪеӨҹжөӢйҮҸHHе’ҢVVжһҒеҢ–зҡ„йӣ·иҫҫжҜ”еҚ•жһҒеҢ–йӣ·иҫҫзҡ„жҖ§иғҪжңүжҳҫзқҖжҸҗй«ҳгҖӮ
иҷҪ然жһҒеҢ–йӣ·иҫҫзі»з»ҹеҜ№и®ҫи®Ўе’Ңеә”з”ЁжқҘиҜҙжӣҙеҠ еӨҚжқӮе’ҢжҳӮиҙөпјҢдҪҶиҝҷдәӣиҖғиҷ‘еҝ…йЎ»дёҺдҪҝз”ЁPCLеҸҜеҮҸиҪ»дҪҺжҺ е°„и§’жө·жқӮжіўзҡ„и§ЈеҶіж–№жЎҲжүҖиҺ·еҫ—зҡ„иғҪеҠӣеҠ д»ҘжқғиЎЎгҖӮ
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·