
式中:θ3dB为半功率波束宽度。
2、三维可视化方法
2.1、圆柱等值面提取
利用VTK软件包实现数据场的可视化,VTK使用的是Pipeline应用程序结构,封装成一系列定义清晰,易于扩展的类,具体流程如图3所示。为获取整个体数据场,可由APM模型分别计算以雷达为原点的各个方位角垂直面上的传播损失,然后将各个垂直剖面联合起来,形成圆柱坐标形式的体数据,如图4所示。提取圆柱体数据场在特定阈值时的等值面即可形成雷达探测范围。为了简化,假设各方位角垂直面上的地形和大气状况相同。
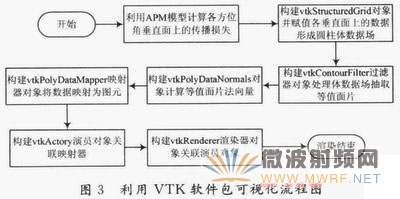
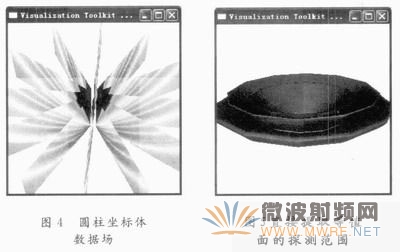
图5是对圆柱体数据提取等值面的效果,实现了雷达探测范围的可视化。但是从中也能明显看出从圆柱体数据直接提取等值面的缺陷,圆柱体数据场数据密度不一致,内密外疏,如图6所示。这样会造成2个问题,一是在探测范围的外边界数据不光滑,误差较大,为了减小误差,需要更多的剖分面,体数据量急剧增加,增大计算负荷;二是探测范围内部数据场密度过大,数据冗余,计算出的等值面片比计算机像素还要小,面片退化为点,浪费计算资源。
2.2、同心圆柱环拼接
为了圆柱体数据场密度不一致问题,提出了一种同心圆柱环拼接算法。首先将圆柱体数据沿距离方向等分为圆柱环,然后从内向外依次填充数据,使得外环的数据密度不小于内环的数据密度,最后将各圆柱体环数据可视化拼接,即可实现对探测范围的可视化。本算法的关键是利用APM模型的递推算法,将初始场外推,减少递推步数,如图7所示。利用已经算出a点和b点的电场值,插值计算出中点c的电场值,把c的电场值作为初始值带入APM模型求解后面的数据。这样就避免了上面提出的2个问题。若a与b之间的地形变化剧烈,这种方法也可能带来较大的误差。这时,应以雷达原点为初始场,计算雷达至c点的电场强度。在工程中,充分考虑雷达周围的地形情况可避免大量的重复运算,如若雷达至a,b和c点的地形一样,或误差很小,那么可以使用任意一点的电场值代替其他点的电场值。

3、结果与分析
设发射频率为1 GHz,天线高度为25 m,采用水平极化方式,地面绝对湿度为0.1 g/m3,地表空气温度为15℃,地面类型为中等干燥地面。利用VTK软件包和同心圆柱环拼接方法,雷达探测范围仿真的结果如图8所示。若加入电子干扰,设雷达的半功率波束宽度为30℃,探测范围仿真结果如图9所示。比较图8、图9和图5,利用同心圆柱拼接算法,探测边界光滑性得到明显的改善。绘制完毕后,用鼠标旋转可以改变视角,速率可满足实时性要求。

在实际的战场环境中,电磁环境非常复杂,除了地形地质、实时变化大气环境,雷达探测范围还与目标散射截面积有关。构建真正可以提供辅助决策功能的虚拟战场平台,还需进行大量的研究与探索,将电磁环境和地理环境充分融合。
作者:张敬卓,袁修文,赵学军,孟慧军
 粤公网安备 44030902003195号
粤公网安备 44030902003195号