еҹәдәҺAPITзҡ„ж— зәҝдј ж„ҹеҷЁзҪ‘з»ңдёүз»ҙе®ҡдҪҚз®—жі•
WSNзҡ„е®ҡдҪҚдё»иҰҒеҲҶеҜ№иҠӮзӮ№иҮӘиә«зҡ„е®ҡдҪҚе’ҢеҜ№еӨ–йғЁзӣ®ж Үзҡ„и·ҹиёӘе®ҡдҪҚгҖӮWSNиҮӘиә«е®ҡдҪҚж–№жі•еҲҶдёәеҹәдәҺжөӢи·қзҡ„ж–№жі•е’ҢйқһеҹәдәҺжөӢи·қзҡ„ж–№жі•гҖӮеҹәдәҺжөӢи·қзҡ„е®ҡдҪҚйҖҡиҝҮжөӢйҮҸзӣёйӮ»иҠӮзӮ№д№Ӣй—ҙзҡ„з»қеҜ№и·қзҰ»жҲ–ж–№дҪҚзӯүжқҘи®Ўз®—жңӘзҹҘиҠӮзӮ№зҡ„дҪҚзҪ®пјҢйңҖиҰҒзү№е®ҡзҡ„硬件и®ҫеӨҮпјҢе®ҡдҪҚзІҫеәҰиҫғй«ҳгҖӮиҖҢйқһеҹәдәҺжөӢи·қзҡ„е®ҡдҪҚжңәеҲ¶ж— йңҖжөӢи·қжҲ–и§’еәҰдҝЎжҒҜпјҢдёҚз”ЁзӣҙжҺҘжөӢйҮҸиҝҷдәӣдҝЎжҒҜпјҢд»…ж №жҚ®зҪ‘з»ңзҡ„иҝһйҖҡжҖ§зӯүдҝЎжҒҜе®һзҺ°иҠӮзӮ№зҡ„е®ҡдҪҚпјҢе…ёеһӢзҡ„жңүиҙЁеҝғз®—жі•гҖҒDV-Hopз®—жі•гҖҒеҮёи§„еҲ’з®—жі•е’ҢAPITз®—жі•зӯүгҖӮ
еҸӮиҖғж–ҮзҢ®жҸҗеҮәдәҶдёҖз§ҚIAPITзҡ„е®ҡдҪҚж–№жі•пјҢдё»иҰҒжҖқи·ҜжҳҜе°Ҷ3иҫ№жөӢйҮҸжі•д»ҘеҸҠеҮ дҪ•дёҠзҡ„з”ұе·ІзҹҘдёӨзӮ№еңЁиҫ…еҠ©жқЎд»¶дёӢжұӮи§ЈдёӨеңҶдәӨзӮ№зҡ„ж–№жі•иһҚе…ҘеҲ°APITз®—жі•дёӯпјҢдҪҶжҳҜз®—жі•д»Қ然еұҖйҷҗдәҺдәҢз»ҙе®…й—ҙдёӯзҡ„е®ҡдҪҚгҖӮеҸӮиҖғж–ҮзҢ®йҖҡиҝҮеҜ№еҚ•и·іиҙЁеҝғз®—жі•иҝӣиЎҢеӨҡи·іжү©еұ•д»Ҙж”№е–„е®ҡдҪҚжҜ”зҺҮпјҢ并еҠ е…ҘеңәејәеҠ жқғиҝҮзЁӢе’ҢеҺ»дёӯеҝғеҢ–иҝҮзЁӢд»ҘжҸҗй«ҳе®ҡдҪҚзІҫеәҰгҖӮеҸӮиҖғж–ҮзҢ®жҸҗеҮәе°ҶжүҖжңү收йӣҶеҲ°зҡ„жқҘиҮӘдәҺеҗҢдёҖдҝЎж ҮиҠӮзӮ№зҡ„RSSIеҖјеҒҡе№іеқҮпјҢдҪңдёәжңӘзҹҘиҠӮзӮ№жҺҘ收еҲ°жӯӨеӣәе®ҡдҝЎж ҮиҠӮзӮ№зҡ„RSSIеҖјпјҢиҝӣиЎҢе®ҡдҪҚи®Ўз®—гҖӮеҸӮиҖғж–ҮзҢ®з»“еҗҲдёүи§’еҪўжөӢиҜ•еҺҹзҗҶ(PIT)пјҢдё»иҰҒй’ҲеҜ№дҝЎж ҮиҠӮзӮ№еҲҶеёғдёҚеқҮеҢҖзҡ„жғ…еҶөжҸҗеҮәдәҶCBPITз®—жі•гҖӮеҸӮиҖғж–ҮзҢ®жҸҗеҮәдәҶдёҖз§ҚиҠӮзӮ№иҮӘиә«зҡ„е®ҡдҪҚж–№жі•пјҢиғҪеӨҹйҖҡиҝҮзӣёеҜ№еҮҶзЎ®зҡ„жөӢиҜ•жқҘзЎ®е®ҡиҠӮзӮ№жүҖеңЁзҡ„еҢәеҹҹпјҢдҪҶжҳҜжІЎжңүиҖғиҷ‘жңӘзҹҘиҠӮзӮ№зӣ‘еҗ¬еҲ°дҝЎж ҮиҠӮзӮ№ж•°зӣ®иҫғе°‘зҡ„жғ…еҶөгҖӮ
жң¬ж–Үй’ҲеҜ№дёүз»ҙз©әй—ҙзҡ„иҠӮзӮ№е®ҡдҪҚжҸҗеҮәдәҶж”№иҝӣзҡ„TDAPITз®—жі•гҖӮ
1 з®—жі•жҸҸиҝ°
1пјҺ1 жңҜиҜӯе®ҡд№ү
в‘ дҝЎж ҮиҠӮзӮ№пјҡе·ІзҹҘдҪҚзҪ®е№¶иғҪеҚҸеҠ©жңӘзҹҘиҠӮзӮ№е®ҡдҪҚзҡ„иҠӮзӮ№пјҢд№ҹз§°й”ҡиҠӮзӮ№гҖӮ
в‘ЎйӮ»еұ…иҠӮзӮ№пјҡеңЁиҠӮзӮ№зҡ„йҖҡдҝЎиҢғеӣҙеҶ…пјҢ并еҸҜдёҺиҝҷдёӘиҠӮзӮ№зӣҙжҺҘйҖҡдҝЎзҡ„жүҖжңүиҠӮзӮ№гҖӮ
в‘ўжңӘзҹҘиҠӮзӮ№пјҡдёҚзҹҘйҒ“иҮӘиә«зҡ„дҪҚзҪ®пјҢйңҖдҪҝз”ЁдҝЎж ҮиҠӮзӮ№зҡ„дҪҚзҪ®дҝЎжҒҜ并иҝҗз”ЁдёҖе®ҡзҡ„з®—жі•еҫ—еҲ°дј°и®ЎдҪҚзҪ®зҡ„иҠӮзӮ№пјҢд№ҹз§°еҫ…е®ҡдҪҚиҠӮзӮ№гҖӮ
в‘Је·ІзҹҘиҠӮзӮ№пјҡең©е§Ӣж—¶дёҚзҹҘйҒ“иҮӘиә«зҡ„дҪҚзҪ®дҝЎжҒҜпјҢдҪҶжҳҜз»ҸиҝҮдёҖж®өж—¶й—ҙзҡ„е®ҡдҪҚеҗҺпјҢе·Із»ҸйҖҡиҝҮдҝЎж ҮиҠӮзӮ№зҡ„дҪҚзҪ®дҝЎжҒҜ并用дёҖе®ҡзҡ„з®—жі•еҫ—еҲ°дәҶдҪҚзҪ®дҝЎжҒҜзҡ„иҠӮзӮ№гҖӮ
в‘ӨдёҚиүҜиҠӮзӮ№пјҡе®ҡдҪҚиҝҮзЁӢз»“жқҹеҗҺпјҢд»Қ然дёҚиғҪеӨҹе®һзҺ°е®ҡдҪҚзҡ„иҠӮзӮ№гҖӮ
е®һйҷ…дёҠпјҢWSNзҡ„иҠӮзӮ№е®ҡдҪҚеҚіжңӘзҹҘиҠӮзӮ№еңЁдҝЎж ҮиҠӮзӮ№зҡ„еҚҸеҠ©дёӢиҪ¬еҸҳжҲҗе·ІзҹҘиҠӮзӮ№зҡ„иҝҮзЁӢгҖӮеңЁе®һйҷ…е®ҡдҪҚиҝҮзЁӢдёӯпјҢз”ұдәҺз§Қз§ҚеҺҹеӣ пјҢйҡҫе…ҚдјҡеҮәзҺ°дёҚиүҜиҠӮзӮ№пјҢеә”еҪ“е°ҪеҠӣеҮҸе°‘дёҚиүҜиҠӮзӮ№зҡ„дёӘж•°гҖӮ
1пјҺ2 APITз®—жі•
APITз®—жі•зҡ„еҹәжң¬жҖқжғіжҳҜжңӘзҹҘиҠӮзӮ№д»»йҖү3дёӘзӣёйӮ»дҝЎж ҮиҠӮзӮ№пјҢжөӢиҜ•жҳҜеҗҰдҪҚдәҺе®ғ们жүҖз»„жҲҗзҡ„дёүи§’еҪўдёӯпјҢдҪҝз”ЁдёҚеҗҢдҝЎж ҮиҠӮзӮ№з»„еҗҲйҮҚеӨҚжөӢиҜ•пјҢзӣҙеҲ°з©·е°ҪжүҖжңүз»„еҗҲжҲ–иҫҫеҲ°жүҖйңҖе®ҡдҪҚзІҫеәҰгҖӮжңҖеҗҺпјҢи®Ўз®—еҢ…еҗ«зӣ®ж ҮиҠӮзӮ№зҡ„жүҖжңүдёүи§’еҪўдәӨйӣҶзҡ„иҙЁеҝғдҪҚзҪ®пјҢ并д»ҘжӯӨдҪңдёәзӣ®ж ҮиҠӮзӮ№дҪҚзҪ®гҖӮ
APITз®—жі•зҗҶи®әеҹәзЎҖжҳҜPITжөӢиҜ•гҖӮеҰӮжһңеӯҳеңЁдёҖдёӘж–№еҗ‘пјҢ并且жІҝзқҖжӯӨж–№еҗ‘иҝҗеҠЁзҡ„жңӘзҹҘиҠӮзӮ№дјҡеҗҢж—¶иҝңзҰ»жҲ–иҖ…жҳҜжҺҘиҝ‘дёүи§’еҪўзҡ„дёүдёӘйЎ¶зӮ№пјҢйӮЈд№ҲжӯӨжңӘзҹҘиҠӮзӮ№еңЁдёүи§’еҪўзҡ„еӨ–йғЁпјҢеҗҰеҲҷеңЁдёүи§’еҪўзҡ„еҶ…йғЁгҖӮ
еңЁе®һйҷ…жөӢиҜ•дёӯпјҢеҸҜд»Ҙз”ЁжңӘзҹҘиҠӮзӮ№е’Ңе®ғзҡ„йӮ»еұ…иҠӮзӮ№жқҘжЁЎжӢҹжӯӨиҝҗеҠЁгҖӮиӢҘжңӘзҹҘиҠӮзӮ№зҡ„йӮ»иҠӮзӮ№йғҪжІЎжңүеҗҢж—¶иҝңзҰ»жҲ–йқ иҝ‘3дёӘдҝЎж ҮиҠӮзӮ№пјҢйӮЈд№ҲжӯӨжңӘзҹҘиҠӮзӮ№е°ұеңЁдёүи§’еҪўеҶ…пјҢеҗҰеҲҷеңЁдёүи§’еҪўеӨ–гҖӮPITжөӢиҜ•ж—¶пјҢдёҖиҲ¬йҮҮз”ЁдҝЎеҸ·ејәеәҰжқҘеҲӨж–ӯиҝңзҰ»жҲ–иҖ…жҳҜжҺҘиҝ‘дҝЎж ҮиҠӮзӮ№гҖӮ
PITжөӢиҜ•иҜҜе·®еҲҶжһҗеҰӮдёӢпјҡ
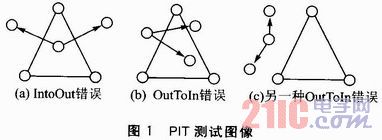
в‘ PITжөӢиҜ•дёӯе®№жҳ“еҮәзҺ°InToOutе’ҢOutToInй”ҷиҜҜгҖӮInToOutй”ҷиҜҜеҚіе°Ҷдёүи§’еҪўеҶ…йғЁзҡ„зӮ№иҜҜеҲӨдёәеңЁдёүи§’еҪўеӨ–йқўгҖӮPITжөӢиҜ•еӣҫеғҸеҰӮеӣҫ1жүҖзӨәгҖӮеҪ“жңӘзҹҘиҠӮзӮ№йқ иҝ‘жҲ–иҖ…жӯЈеҘҪеңЁдёүи§’еҪўзҡ„дёҖжқЎиҫ№дёҠж—¶пјҢе°ұе®№жҳ“еҮәзҺ°дёҠиҝ°зҡ„й”ҷиҜҜгҖӮ
в‘ЎеҰӮжһңдҝЎж ҮиҠӮзӮ№е’ҢжңӘзҹҘиҠӮзӮ№зҡ„йӮ»еұ…иҠӮзӮ№еҜҶеәҰиҝҮе°ҸпјҢеҜ№е®ҡдҪҚз»“жһңзҡ„еҪұе“ҚеҫҲеӨ§пјҢжҠ‘жҲ–дҪҝеҫ—жңүдәӣиҠӮзӮ№дёҚиғҪиў«е®ҡдҪҚпјҢе®ҡдҪҚиҰҶзӣ–зҺҮиҫғдҪҺгҖӮ
в‘ўеңЁзҪ‘з»ңзҡ„дёӯй—ҙйғЁеҲҶе’ҢжңӘзҹҘиҠӮзӮ№зӣёйӮ»зҡ„дҝЎж ҮиҠӮзӮ№еҸҜиғҪеҫҲеӨҡпјҢдҪҶжҳҜе…¶дёӯд»»ж„Ҹ3дёӘиҠӮзӮ№жүҖз»„жҲҗзҡ„дёүи§’еҪўеҸҜиғҪйғҪдёҚеҢ…жӢ¬жңӘзҹҘиҠӮзӮ№пјҢеӣ жӯӨеңЁз®—жі•е®ҢжҲҗеҗҺд»ҚдёҚиғҪе®ҡдҪҚиҝҷзұ»иҠӮзӮ№гҖӮ
в‘ЈеңЁзҪ‘з»ңзҡ„иҫ№зјҳйғЁеҲҶпјҢе®№жҳ“йҖ жҲҗж— жі•ж»Ўи¶іAPITзҡ„е®ҡдҪҚжқЎд»¶пјҢеҪ“е’ҢжңӘзҹҘиҠӮзӮ№зӣёйӮ»зҡ„дҝЎж ҮиҠӮзӮ№ж•°зӣ®е°‘дәҺ3дёӘж—¶пјҢйҖ жҲҗжңӘзҹҘиҠӮзӮ№ж— жі•е®ҡдҪҚгҖӮ
в‘ӨеҜ№йҮҚеҸ еҢәеҹҹзҡ„йҮҚеҝғи®Ўз®—дёӯпјҢйҮҮз”Ёзҡ„жҳҜзҪ‘ж јжү«жҸҸзҡ„з®—жі•пјҢж•ҲзҺҮиҫғдҪҺпјҢи®Ўз®—зІҫеәҰдёҚй«ҳгҖӮ
в‘Ҙз®—жі•дёӯпјҢжңӘзҹҘиҠӮзӮ№дёҚд»…иҰҒдёҺдҝЎж ҮиҠӮзӮ№дәӨдә’дҝЎжҒҜпјҢиҝҳиҰҒдёҺе…¶д»–зҡ„йӮ»еұ…иҠӮзӮ№иҝӣиЎҢеҚҸи°ғдҝЎжҒҜеӨ„зҗҶпјҢдҪҝеҫ—зҪ‘з»ңдёӯиҠӮзӮ№зҡ„и®Ўз®—йҮҸеўһеӨ§пјҢйҖҡдҝЎејҖй”Җд№ҹдёҠеҚҮдәҶеҫҲеӨҡгҖӮ
1пјҺ3 еҹәдәҺAPITзҡ„дёүз»ҙе®ҡдҪҚж–№жі•
1пјҺ3пјҺ1 TDAPITз®—жі•еҺҹзҗҶ
дҝЎж ҮиҠӮзӮ№жҳҜWSNз©әй—ҙдёӯе·Із»ҸзҹҘйҒ“иҮӘиә«еқҗж ҮдҪҚзҪ®зҡ„еӣәе®ҡиҠӮзӮ№(еҰӮйҖҡиҝҮGPRSе®ҡдҪҚзӯү)пјҢз©әй—ҙдёӯзҡ„д»»ж„ҸдёҖдёӘжңӘзҹҘиҠӮзӮ№пјҢиғҪеӨҹзӣ‘еҗ¬еҲ°дҝЎж ҮиҠӮзӮ№зҡ„ж•°зӣ®дёәnпјҢйӮЈд№Ҳд»Һnдёӯд»»ж„ҸйҖүеҸ–4дёӘзӮ№з»„жҲҗдёҖдёӘеӣӣйқўдҪ“пјҢе…ұжңүC4nдёӘеӣӣйқўдҪ“пјӣ然еҗҺпјҢжөӢиҜ•иҜҘжңӘзҹҘиҠӮзӮ№жҳҜеҗҰеңЁиҝҷ4дёӘдҝЎж ҮиҠӮзӮ№з»„жҲҗзҡ„еӣӣйқўдҪ“еҶ…пјҢйҮҚеӨҚиҝҷз§ҚжөӢиҜ•пјҢзӣҙеҲ°зӣ‘еҗ¬еҲ°жүҖжңүдҝЎж ҮиҠӮзӮ№зҡ„з»„еҗҲжҲ–иҖ…жҳҜиҫҫеҲ°дәҶиҰҒжұӮзҡ„зІҫеәҰпјӣжңҖеҗҺпјҢи®Ўз®—еҢ…еҗ«жңӘзҹҘиҠӮзӮ№зҡ„жүҖжңүеӣӣйқўдҪ“зҡ„йҮҚеҸ еҢәеҹҹпјҢе°ҶйҮҚеҸ еҢәеҹҹзҡ„иҙЁеҝғдҪңдёәжңӘзҹҘиҠӮзӮ№зҡ„дҪҚзҪ®гҖӮ
1пјҺ3пјҺ2 TDAPITжөӢиҜ•
иӢҘеӯҳеңЁдёҖдёӘж–№еҗ‘пјҢжІҝзқҖиҝҷдёӘж–№еҗ‘жңӘзҹҘиҠӮзӮ№MдјҡеҗҢж—¶иҝңзҰ»жҲ–жҺҘиҝ‘еӣӣйқўдҪ“зҡ„еӣӣдёӘйЎ¶зӮ№пјҢеҲҷMдҪҚдәҺеӣӣйқўдҪ“еӨ–пјҢеҗҰеҲҷMдҪҚдәҺеӣӣйқўдҪ“еҶ…йғЁгҖӮ
еңЁйҡҸжңәйғЁзҪІзҡ„дј ж„ҹеҷЁзҪ‘з»ңдёӯпјҢжңүдёҖдәӣиҠӮзӮ№дҫҰеҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№дёӘж•°е°ҸдәҺ4пјҢеҲҷиҝҷдәӣиҠӮзӮ№дёҚиғҪиҝӣиЎҢPITжөӢиҜ•пјӣжңүдәӣиҠӮзӮ№е°Ҫз®ЎжҺҘ收еҲ°зҡ„дҝЎж ҮиҠӮзӮ№ж•°зӣ®еӨ§дәҺжҲ–зӯүдәҺ4дёӘпјҢд№ҹиғҪиҝӣиЎҢPITжөӢиҜ•пјҢдҪҶжҳҜеҚҙд»Қз„¶ж— жі•еҲӨж–ӯе…¶дҪҚзҪ®гҖӮеңЁжөӢиҜ•дёӯпјҢеҲ©з”ЁеҰӮдёӢж–№жі•еҲӨж–ӯжңӘзҹҘиҠӮзӮ№дҪҚзҪ®пјҡ
в‘ йҖҡиҝҮжңӘзҹҘиҠӮзӮ№жҺҘ收еҲ°дҝЎж ҮиҠӮзӮ№зҡ„RSSеҖјеӨ§е°ҸжқҘеҲӨж–ӯиҠӮзӮ№е’ҢдҝЎж ҮиҠӮзӮ№д№Ӣй—ҙзҡ„и·қзҰ»гҖӮ
в‘ЎйҖҡиҝҮжңӘзҹҘиҠӮзӮ№зҡ„йӮ»еұ…иҠӮзӮ№жқҘжЁЎжӢҹжңӘзҹҘиҠӮзӮ№зҡ„移еҠЁпјҢеҚіеҒҮи®ҫжңӘзҹҘиҠӮзӮ№з§»еҠЁеҲ°е®ғзҡ„йӮ»еұ…иҠӮзӮ№гҖӮ
в‘ўйҖҡиҝҮеҜ№жңӘзҹҘиҠӮзӮ№жүҖжңүйӮ»еұ…иҠӮзӮ№зҡ„жЁЎжӢҹжқҘиҝ‘дјјең°йҒҚеҺҶжңӘзҹҘиҠӮзӮ№зҡ„жүҖжңүж–№еҗ‘гҖӮ
в‘ЈдёәдәҶеҮҸе°‘InToOutе’ҢOutToInй”ҷиҜҜпјҢжҲ‘们еҸҜд»ҘйҖҡиҝҮеңЁиҠӮзӮ№дёҠи®ҫзҪ®зӣёеә”зҡ„MAXrssе’ҢMINrssйҳҲеҖјжқҘиҝӣдёҖжӯҘеҲӨж–ӯгҖӮеҜ№дәҺеҲқжӯҘеҲӨе®ҡдёәеңЁдёүи§’еҪўеӨ–йғЁзҡ„иҠӮзӮ№пјҢеҰӮжһңжңӘзҹҘиҠӮзӮ№жҺҘ收еҲ°зҡ„дҝЎеҸ·ејәеәҰеҖјеӨ§дәҺи®ҫзҪ®зҡ„йҳҲеҖјпјҢеҲҷи®ӨдёәеҲӨе®ҡй”ҷиҜҜпјӣеҗҢж ·пјҢеҜ№дәҺеҲӨе®ҡдёәеңЁдёүи§’еҪўеҶ…йғЁзҡ„иҠӮзӮ№пјҢеҰӮжһңжҺҘ收еҲ°зҡ„дҝЎеҸ·ејәеәҰе°ҸдәҺи®ҫе®ҡзҡ„йҳҲеҖјпјҢеҲҷи®ӨдёәеҸ‘з”ҹOutToInй”ҷиҜҜгҖӮ
1пјҺ3пјҺ3 TDAPITз®—жі•жөҒзЁӢ
TDAPITз®—жі•жөҒзЁӢжӯҘйӘӨеҰӮдёӢпјҡ
в‘ иҠӮзӮ№йғЁзҪІе®ҢжҲҗеҗҺпјҢзҪ‘з»ңеҲқе§ӢеҢ–й…ҚзҪ®гҖӮдҝЎж ҮиҠӮзӮ№еҗ‘зҪ‘з»ңе№ҝж’ӯж¶ҲжҒҜ(ж¶ҲжҒҜеә”иҜҘеҢ…еҗ«дҝЎж ҮиҠӮзӮ№зҡ„IDгҖҒдҪҚзҪ®еқҗж ҮзӯүдҝЎжҒҜ)пјҢиҖҢжңӘзҹҘиҠӮзӮ№зӣ‘еҗ¬дҝЎж ҮиҠӮзӮ№зҡ„ж¶ҲжҒҜгҖӮжӯӨйҳ¶ж®өжңӘзҹҘиҠӮзӮ№еә”йҡҸж—¶жӣҙж–°жҺҘ收еҲ°зҡ„дҝЎжҒҜпјҢд»ҘйҳІжӯўеҶҲзҪ‘з»ңзҡ„жӢ“жү‘еҸҳеҢ–иҖҢйҖ жҲҗзҡ„иҜҜе·®еҪұе“ҚгҖӮ
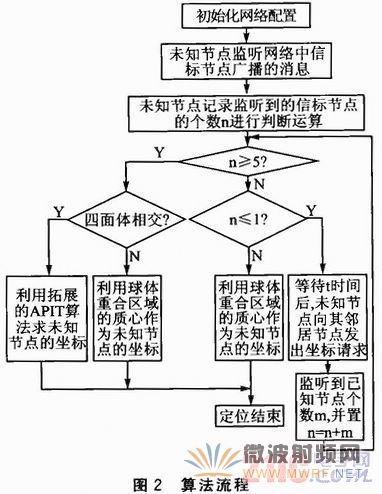
в‘Ўи®ҫжңӘзҹҘиҠӮзӮ№Mзӣ‘еҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№ж•°зӣ®дёәn(n=0пјҢ1пјҢ2пјҢ3пјҢ4пјҢ5пјҢ6…)гҖӮдҝЎж ҮиҠӮзӮ№зҡ„еқҗж ҮдёәA1пјҢA2пјҢA3пјҢA4пјҢ…пјҢAnпјҢжңӘзҹҘиҠӮзӮ№е°Ҷзӣ‘еҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№зҡ„еқҗж Үеӯҳе…Ҙж•°з»„пјҢеҰӮжһңnе°ҸдәҺ5еҲҷ继з»ӯдёӢдёҖжӯҘпјҢеҗҰеҲҷиҪ¬еҗ‘жӯҘйӘӨв‘Јпјӣ
в‘ўеҪ“n=4гҖҒ3жҲ–2ж—¶пјҢеҚіжңӘзҹҘиҠӮзӮ№еҸӘиғҪзӣ‘еҗ¬еҲ°4гҖҒ3жҲ–2дёӘдҝЎж ҮиҠӮзӮ№гҖӮд»ҘжңӘзҹҘиҠӮзӮ№жүҖиғҪзӣ‘еҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№дёәеңҶеҝғпјҢд»ҘйҖҡдҝЎи·қзҰ»дёәеҚҠеҫ„еҲҶеҲ«дҪңзҗғпјҢдёӨзҗғеҲҶеҲ«зӣёдәӨпјҢеҲҶеҲ«жұӮеҮә4дёӘзҗғдҪ“гҖҒ3дёӘзҗғдҪ“гҖҒ2дёӘзҗғдҪ“йҮҚеҸ еҢәеҹҹзҡ„иҙЁеҝғдҪңдёәжңӘзҹҘиҠӮзӮ№зҡ„еқҗж ҮгҖӮ
еҪ“n=1жҲ–0ж—¶пјҢеҚіжңӘзҹҘиҠӮзӮ№еҸӘиғҪзӣ‘еҗ¬еҲ°1жҲ–0дёӘдҝЎж ҮиҠӮзӮ№гҖӮжӯӨж—¶пјҢжңӘзҹҘиҠӮзӮ№зӯүеҫ…дёҖж®өж—¶й—ҙt(иҝҷйҮҢtеә”и®ҫзҪ®дёәз•Ҙе°ҸдәҺе®ҡдҪҚе‘Ёжңҹ)еҗҺпјҢеҗ‘е…¶жүҖжңүйӮ»еұ…иҠӮзӮ№е№ҝж’ӯж¶ҲжҒҜпјҢиҜ·жұӮиҺ·зҹҘйӮ»еұ…иҠӮзӮ№зҡ„еқҗж ҮдҝЎжҒҜгҖӮиӢҘжІЎжңүйӮ»еұ…иҠӮзӮ№иҝ”еӣһж¶ҲжҒҜпјҢйӮЈд№ҲйҮҚеӨҚжү§иЎҢжӯӨжӯҘйӘӨпјӣиӢҘжңүйӮ»еұ…иҠӮзӮ№иҝ”еӣһж¶ҲжҒҜдҪҶйӮ»еұ…иҠӮзӮ№е°ҡжңӘе®ҡдҪҚпјҢеҲҷдҝЎж ҮиҠӮзӮ№з»§з»ӯзӯүеҫ…дёҖе°Ҹж®өйҡҸжңәзҡ„ж—¶й—ҙеҗҺпјҢйҮҚеӨҚиҜ·жұӮж¶ҲжҒҜпјӣиӢҘжңүйӮ»еұ…иҠӮзӮ№иҝ”еӣһж¶ҲжҒҜ并且йӮ»еұ…иҠӮзӮ№е·Із»Ҹе®ҡдҪҚе®ҢжҜ•пјҢжӯӨж—¶йӮ»еұ…иҠӮзӮ№жҲҗдёәе·ІзҹҘиҠӮзӮ№пјҢеҲҷжңӘзҹҘиҠӮзӮ№жҠҠе·ІзҹҘиҠӮзӮ№еҪ“жҲҗдҝЎж ҮиҠӮзӮ№пјҢйҮҚеӨҚжү§иЎҢжӯҘйӘӨв‘ гҖӮ
в‘Јд»ҺnдёӘдҝЎж ҮиҠӮзӮ№дёӯд»»еҸ–4дёӘиҠӮзӮ№з»„жҲҗi(i=1пјҢ2пјҢ3пјҢ4пјҢ…пјҢC4n)дёӘеӣӣйқўдҪ“пјҢеҫ—еҲ°еҢ…еҗ«жңӘзҹҘиҠӮзӮ№зҡ„жүҖжңүеӣӣйқўдҪ“пјҢж №жҚ®еӣӣйқўдҪ“зӣёдәӨеҗҺзҡ„йҮҚеҸ еҢәеҹҹи®Ўз®—жӯӨйҮҚеҸ еҢәеҹҹзҡ„иҙЁеҝғеқҗж ҮдҪңдёәжңӘзҹҘиҠӮзӮ№зҡ„еқҗж ҮгҖӮ
1пјҺ3пјҺ4 з®—жі•еҲҶжһҗ
дҝЎж ҮиҠӮзӮ№е№ҝж’ӯж¶ҲжҒҜж—¶пјҢйҮҮз”ЁжҙӘжіӣзҡ„ж–№жі•пјҢдҪҝеҫ—йҖҡдҝЎи·қзҰ»еҶ…зҡ„жңӘзҹҘиҠӮзӮ№йғҪеҸҜд»Ҙзӣ‘еҗ¬еҲ°ж¶ҲжҒҜпјҢиҖҢдё”жңӘзҹҘиҠӮзӮ№еҸӘиҙҹиҙЈзӣ‘еҗ¬ж¶ҲжҒҜпјҢ并дёҚйңҖиҰҒе’ҢзӣёйӮ»иҠӮзӮ№иҝӣиЎҢж¶ҲжҒҜдәӨжҚўгҖӮиҝҷж ·е°ұеӨ§еӨ§еҮҸе°‘дәҶзҪ‘з»ңдёӯжңӘзҹҘиҠӮзӮ№зҡ„йҖҡдҝЎйҮҸпјҢеўһеҠ дәҶзҪ‘з»ңз”ҹе‘Ҫе‘ЁжңҹгҖӮдҪҶжҳҜдёәдәҶдҪҝеҫ—жңӘзҹҘиҠӮзӮ№иғҪеӨҹзӣ‘еҗ¬еҲ°жӣҙеӨҡзҡ„дҝЎж ҮиҠӮзӮ№пјҢжҲ‘们и®ҫе®ҡиғҪйҮҸиҫғеӨҡзҡ„дҝЎж ҮиҠӮзӮ№жқҘе№ҝж’ӯдёӨж¬Ўж¶ҲжҒҜгҖӮ第дёҖж¬Ўе№ҝж’ӯж¶ҲжҒҜж—¶еҗҢж—¶зӣ‘еҗ¬е‘Ёеӣҙзҡ„дҝЎж ҮиҠӮзӮ№зҡ„е№ҝж’ӯпјҢе°Ҷзӣ‘еҗ¬еҲ°зҡ„е…¶д»–дҝЎж ҮиҠӮзӮ№зҡ„ж¶ҲжҒҜи®°еҪ•дёӢжқҘгҖӮ第дәҢж¬Ўе№ҝж’ӯж—¶пјҢе°ҶжүҖзҹҘйҒ“зҡ„жүҖжңүзҡ„дҝЎж ҮиҠӮзӮ№зҡ„дҝЎжҒҜйғҪе№ҝж’ӯеҮәеҺ»пјҢжӯӨж—¶зӣ‘еҗ¬зҡ„иҠӮзӮ№е°ҶжҺҘ收еҲ°зҡ„ж¶ҲжҒҜе’Ң第дёҖж¬ЎжҺҘ收зҡ„ж¶ҲжҒҜеҜ№жҜ”пјҢиӢҘеҸ‘зҺ°жңүж–°зҡ„дҝЎж ҮиҠӮзӮ№еҲҷеҸҠж—¶жӣҙж–°дҝЎжҒҜгҖӮ
еҜ№дәҺжңӘзҹҘиҠӮзӮ№зӣ‘еҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№пјҢдёҚиғҪжһ„жҲҗеӣӣйқўдҪ“зӣёдәӨзҡ„пјҢеҲ©з”ЁзҗғдҪ“йҮҚеҗҲеҢәеҹҹзҡ„иҙЁеҝғдҪңдёәжңӘзҹҘиҠӮзӮ№зҡ„еқҗж ҮгҖӮеҰӮжһңжңӘзҹҘиҠӮзӮ№зӣ‘еҗ¬еҲ°зҡ„дҝЎж ҮиҠӮзӮ№ж•°зӣ®иҫғе°‘пјҢеҸҜд»ҘеҲ©з”Ёе·Із»Ҹе®ҡдҪҚе®ҢжҜ•зҡ„иҠӮзӮ№жқҘеҜ№жңӘзҹҘиҠӮзӮ№иҝӣиЎҢе®ҡдҪҚгҖӮеңЁжұӮи§ЈзҗғдҪ“йҮҚеҗҲеҢәеҹҹзҡ„иҙЁеҝғж—¶пјҢеҸҜд»ҘеҲ©з”ЁзҪ‘ж јжү«йқўз®—жі•пјҢи®Ўз®—йҮҸиҫғеӨ§гҖҒиҜҜе·®иҫғе°Ҹпјӣд№ҹеҸҜд»ҘеҲ©з”ЁеӣӣйқўдҪ“иҙЁеҝғжү«йқўз®—жі•пјҢи®Ўз®—йҮҸиҫғе°ҸдҪҶжҳҜиҜҜе·®иҫғеӨ§пјҢж №жҚ®е®һйҷ…жғ…еҶөдәҲд»ҘйҖүжӢ©гҖӮ
1пјҺ4 з®—жі•жөҒзЁӢ
ж•ҙдёӘз®—жі•зҡ„жөҒзЁӢеҰӮеӣҫ2жүҖзӨәгҖӮ
2 е®һйӘҢд»ҝзңҹдёҺиҜ„дј°
жң¬ж–ҮдёӯйҮҮз”Ёзҡ„д»ҝзңҹиҪҜ件жҳҜVisual C++дёҺMatlab7пјҺ5пјҢйҖүеҸ–зҡ„е®һйӘҢеҸӮж•°жҳҜе®ҡдҪҚиҰҶзӣ–зҺҮе’Ңе®ҡдҪҚиҜҜе·®гҖӮд»ҝзңҹе®һйӘҢдёӯпјҢ200дёӘиҠӮзӮ№жҳҜйҡҸжңәйғЁзҪІеңЁиҫ№й•ҝдёә80 mзҡ„жӯЈж–№дҪ“зӣ‘жөӢеҢәеҹҹеҶ…пјҢдҝЎж ҮиҠӮзӮ№е’ҢжңӘзҹҘиҠӮзӮ№зҡ„йҖҡдҝЎеҚҠеҫ„йғҪжҳҜдёҖж ·зҡ„гҖӮдёәдәҶеҮҸе°‘йҡҸжңәеҲҶеёғе’ҢеҒ¶з„¶еӣ зҙ еёҰжқҘзҡ„еҪұе“ҚпјҢд»ҝзңҹзҡ„з»“жһңжҳҜеңЁзӣёеҗҢзҡ„еҸӮж•°дёӢд»ҝзңҹ50ж¬Ўзҡ„е№іеқҮеҖјгҖӮйҖҡиҝҮжҜ”иҫғдәҢз»ҙз©әй—ҙдёӯзҡ„APITе’Ңж–ҮдёӯжҸҗеҮәзҡ„дёүз»ҙTDAPITз®—жі•еңЁдёҚеҗҢзҡ„дҝЎж ҮиҠӮзӮ№жҜ”дҫӢзҡ„жғ…еҶөдёӢзҡ„е®ҡдҪҚиҰҶзӣ–зҺҮе’Ңе®ҡдҪҚиҜҜе·®пјҢжңҖеҗҺжқҘеҲҶжһҗжү©еұ•еҗҺз®—жі•зҡ„дјҳеҠЈгҖӮ
2пјҺ1 е®ҡдҪҚиҰҶзӣ–зҺҮ
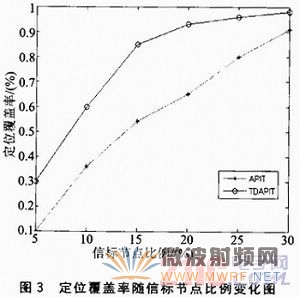
е®ҡдҪҚиҰҶзӣ–зҺҮйҡҸдҝЎж ҮиҠӮзӮ№жҜ”дҫӢеҸҳеҢ–еӣҫеҰӮеӣҫ3жүҖзӨәгҖӮеңЁдҝЎж ҮиҠӮзӮ№жҜ”дҫӢдёә5%ж—¶пјҢAPITе®ҡдҪҚиҰҶзӣ–зҺҮзәҰдёә10%пјҢиҖҢTDAPITзәҰдёә30%пјҢиҝҷиҜҙжҳҺзӣёеҜ№дәҺдәҢз»ҙз©әй—ҙдёӯзҡ„APITе®ҡдҪҚпјҢTDAPITе®ҡдҪҚеңЁдёүз»ҙз©әй—ҙдёӯзҡ„е®ҡдҪҚиҰҶзӣ–зҺҮеңЁдҝЎж ҮиҠӮзӮ№жҜ”дҫӢиҫғе°Ҹж—¶пјҢд»ҚиғҪеҸ‘жҢҘзӣёеҪ“зҡ„ж•Ҳз”ЁгҖӮйҡҸзқҖдҝЎж ҮиҠӮзӮ№жҜ”дҫӢзҡ„дёҠеҚҮпјҢTDAPITзҡ„е®ҡдҪҚиҰҶзӣ–зҺҮжӣҙжҳҜжҳҺжҳҫең°дёҠеҚҮпјҢеңЁдҝЎж ҮиҠӮзӮ№жҜ”дҫӢдёә20%е·ҰеҸіж—¶пјҢе®ҡдҪҚиҰҶзӣ–зҺҮе°ұиҫҫеҲ°дәҶ90%д»ҘдёҠгҖӮеңЁиҝҷд»ҘеҗҺпјҢдҝЎж ҮиҠӮзӮ№жҜ”дҫӢзҡ„еўһеҠ еҜ№е®ҡдҪҚиҰҶзӣ–зҺҮзҡ„еҪұе“ҚеӨ§еӨ§йҷҚдҪҺгҖӮиҝҷжҳҜеӣ дёәеңЁз®—жі•дёӯйҮҮз”ЁдәҶеҫӘзҺҜжү©ж•Јзҡ„жҖқжғіпјҢеҚіе°Ҷе·ІзҹҘиҠӮзӮ№еҪ“еҒҡдҝЎж ҮиҠӮзӮ№жқҘе®һзҺ°е®ҡдҪҚпјҢжңҖеӨ§йҷҗеәҰең°еҮҸе°‘дәҶдёҚиүҜиҠӮзӮ№зҡ„ж•°зӣ®гҖӮеңЁдҝЎж ҮиҠӮзӮ№жҜ”дҫӢиҫҫеҲ°30%е·ҰеҸіж—¶пјҢAPITз®—жі•зҡ„е®ҡдҪҚиҰҶзӣ–зҺҮеңЁ85%е·ҰеҸіпјҢиҖҢдё”д»Қ然иҝҳжңүдёҠеҚҮзҡ„и¶ӢеҠҝпјҢиҜҙжҳҺAPITз®—жі•еҜ№дҝЎж ҮиҠӮзӮ№жҜ”дҫӢзҡ„дҫқиө–зЁӢеәҰжҜ”иҫғй«ҳгҖӮ
2пјҺ2 е®ҡдҪҚиҜҜе·®
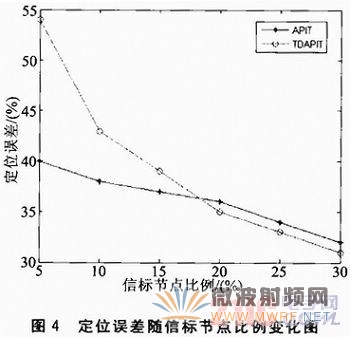
е®ҡдҪҚиҜҜе·®йҡҸдҝЎж ҮиҠӮзӮ№жҜ”дҫӢеҸҳеҢ–еӣҫеҰӮеӣҫ4жүҖзӨәгҖӮиҜҘд»ҝзңҹз»“жһңиҜҙжҳҺпјҢеңЁзҪ‘з»ңйғЁзҪІдёҖе®ҡж—¶пјҢеҪ“дёӨз§Қз®—жі•зҡ„е®ҡдҪҚиҜҜе·®иҫҫеҲ°35%е·ҰеҸіж—¶пјҢдёӨиҖ…зҡ„е®ҡдҪҚзІҫеәҰеҫҲйҡҫеҶҚеҫ—еҲ°жҳҺжҳҫж”№е–„гҖӮеңЁдҝЎж ҮиҠӮзӮ№жҜ”дҫӢдёә5%е·ҰеҸіж—¶пјҢTDAPITзҡ„е®ҡдҪҚиҜҜе·®жҳҺжҳҫеӨ§дәҺAPITзҡ„е®ҡдҪҚиҜҜе·®пјҢиҝҷжҳҜеӣ дёәеңЁзҪ‘з»ңзҡ„еҲқе§Ӣйҳ¶ж®өпјҢAPITеҸҜе®ҡдҪҚзҡ„иҠӮзӮ№ж•°зӣ®иҫғе°‘пјҢиҖҢTDAPITиғҪеӨҹе®ҡдҪҚзҡ„иҠӮзӮ№зӣёеҜ№иҫғеӨҡпјҢиҖҢдё”TDAPITе®ҡдҪҚж—¶пјҢеҲ©з”ЁдәҶжң¬иә«е®ҡдҪҚе°ұжңүиҜҜе·®зҡ„е·ІзҹҘиҠӮзӮ№пјҢдҪҝеҫ—е®ҡдҪҚеҮәзҡ„иҠӮзӮ№зҡ„иҜҜе·®еҫ—еҲ°зҙҜеҠ пјҢжҳҺжҳҫеҠ еӨ§дәҶе®ҡдҪҚиҜҜе·®гҖӮеҪ“дҝЎж ҮиҠӮзӮ№жҜ”дҫӢеңЁ20%е·ҰеҸіж—¶пјҢдёӨз§Қз®—жі•зҡ„е®ҡдҪҚиҜҜе·®еҸҳеҢ–дёҚжҳҺжҳҫпјҢжӯӨж—¶еўһеҠ дҝЎж ҮиҠӮзӮ№жҜ”дҫӢж—¶пјҢTDAP ITз•Ҙжҳҫдјҳз§ҖпјҢдҪҶе®ҡдҪҚиҜҜе·®д»Қ然еңЁ30%д»ҘдёҠпјҢз”ұжӯӨеҸҜи§Ғиҝҷз§ҚйқһеҹәдәҺжөӢи·қзҡ„е®ҡдҪҚж–№жі•иҷҪ然жҲҗжң¬иҫғдҪҺгҖҒе®һзҺ°з®ҖеҚ•пјҢдҪҶжҳҜе®ҡдҪҚиҜҜе·®жҜ”иҫғеӨ§пјҢиҖҢдё”еҪ“дҝЎж ҮиҠӮзӮ№жҜ”дҫӢиҫҫеҲ°30%ж—¶пјҢе®ҡдҪҚиҜҜе·®д»Қ然еңЁ30%д»ҘдёҠпјҢжӯӨж—¶еҚідҪҝеўһеҠ дҝЎж ҮиҠӮзӮ№зҡ„жҜ”дҫӢд№ҹеҫҲйҡҫж”№еҸҳе®ҡдҪҚиҜҜе·®гҖӮ
з»“иҜӯ
жң¬ж–ҮеҹәдәҺе№ійқўдёӯзҡ„APITз®—жі•пјҢжҸҗеҮәдәҶжү©еұ•зҡ„дёүз»ҙTDAPITз®—жі•гҖӮ并еңЁеҲҶжһҗAPITиҜҜе·®жқҘжәҗзҡ„еҹәзЎҖдёҠпјҢеҜ№TDAPITиҝӣиЎҢдәҶзӣёеә”зҡ„ж”№иҝӣгҖӮжү©еұ•зҡ„TDAPITз®—жі•иғҪеӨҹиҫғеҘҪзҡ„еңЁдёүз»ҙз©әй—ҙдёӯе®һзҺ°иҠӮзӮ№зҡ„е®ҡдҪҚгҖӮйҖҡиҝҮд»ҝзңҹе®һйӘҢпјҢиҷҪ然еңЁзҪ‘з»ңзҡ„еҲқе§Ӣйҳ¶ж®өпјҢTDAPITзҡ„е®ҡдҪҚиҰҶзӣ–зҺҮеңЁдҝЎж ҮиҠӮзӮ№еҫҲе°‘зҡ„жғ…еҶөдёӢиҫғй«ҳпјҢдҪҶиҝҷжҳҜд»ҘеўһеҠ е®ҡдҪҚиҜҜе·®дёәд»Јд»·зҡ„гҖӮ
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·