1、引言
近年来,智能交通、无人驾驶、车辆紧急定位报警等业务需求越来越迫切,车载导航定位功能是实现上述业务的基础。车辆的导航定位通过前装或后装车载终端来完成,其性能指标直接影响相关业务的用户体验,因此对车载终端的导航定位性能进行测试评估是非常必要的。
2、车载导航定位概述
目前,市面上的车载终端以Telematics 产品为主。Telematics是由Telecommunication(电信学)与Information(信息学)组成的复合词,其含意是指:利用车用通信与信息服务,让汽车驾乘者可以在车内利用无线通信技术随时随地与外在环境资源做双向的信息传输与传递服务,提供使用者适时化、位置化、个人化的应用服务。Telematics车载终端可以实现通信服务类功能、导航定位类功能、咨询娱乐类功能、远程监控功能、车况数据上报等功能。其中,导航定位功能是最基础、应用最广泛的功能之一,主要是利用GNSS、A-GNSS、基站定位等定位技术,可以为驾乘人员提供位置信息查询、位置导航、实时路况和在线更新地图等基于位置的服务。
车辆中的导航定位功能可以通过前装系统来实现,例如通用的OnStar系统,也可以通过后装终端来实现。车载终端一般可以提供位置搜索功能,查找指定的目的地的位置或者基于某一位置查找周边一定范围内符合搜索条件的地址信息;可以提供路线计算与引导功能,依据一定的路由策略(如最短的路径、实时道路交通情况等),为驾乘人员规划从起点到终点的行车路线,并且可以提供实时交通路况信息等。
上述功能都是常规的导航定位应用场景,在特殊场景下,比如发生紧急状况时,一些车载终端还能提供定位报警服务,即在报警的同时,上报车辆准确的位置信息。在事故发生时,将位置信息自动发送出去将大大提高紧急救援的时效性,根据欧盟的估计,紧急情况下定位报警可以减少约60%的救援时间。这个过程中,定位报警提供位置信息的速度和位置准确性非常关键。可以认为,导航定位功能是车载终端最基础的功能,基于该功能可以为驾乘人员提供各种基于位置的应用服务。紧急情况下定位报警可以算作基于位置的服务之一,而要实现该服务,需要终端、通信网络、接警中心等各方面的配合。
俄罗斯的ERA-GLONASS系统和欧洲的E-Call系统是目前较成熟的车辆紧急情况下的定位报警系统。根据俄罗斯相关技术法规,从2015年1月开始,想要获得关税同盟首次批准的进口全新车型必须配装车载ERA-GLONASS终端;从2017年开始,关税同盟国所有上路的新车必须配装该设备。欧盟目前的规定是,从2018年4月起,欧洲所有轿车及轻型货车必须配备紧急自动呼叫装置E-Call。
我国于2014年1月3日成立了公众紧急报警传送及定位技术推进组,中国信息通信研究院(原工业和信息化部电信研究院)为组长单位,联合公安部第一研究所、三大运营商、终端厂商等共同制定适用于我国国情的紧急情况下的定位报警技术标准、测试标准,并计划搭建演示系统,逐步向现网中推广应用。
3、标准化情况
3.1、国际标准
卫星导航相关的国际标准主要分为卫星导航信号格式标准、接收设备数据格式标准、接收设备性能要求及测试方法标准。
卫星导航信号格式标准主要为接口控制文件(ICD文件),由各国导航卫星系统研发制定国公布,规定信号载波频率、数据码型、星历、历书等参数。目前,中国的北斗、美国GPS、俄罗斯GLONASS、欧洲Galileo系统均已公布接口控制文件。
国际上广泛应用的卫星导航接收设备数据格式标准包括海洋电子设备接口标准NMEA0183、航海无线电技术委员会标准RTCM-SC104、航空无线电技术委员会的RTCA-SC159标准、国际大地测量协会的RINEX3.0标准等。
国际上接收设备性能要求及测试方法标准主要采用国际电工委员会(IEC)的IEC61108系列标准。在信息通信领域,采用通信网络辅助的卫星导航方式提高导航定位性能,射频性能一致性和协议一致性标准主要包括3GPP TS 36.305、TS 36.171、TS 36.355、3GPP TS 37.571等。空间射频性能标准由国际标准组织CTIA负责制定,其中AGPS OTA标准在ERP工作组完成,A-GLONASS OTA标准在A-GNSS工作组完成,A-BDS OTA标准在该标准中暂未涉及,标准版本还在不断更新中,最新版本为《ctia_ota_test_plan_ver_3_5》。
针对车载终端导航定位,国际上主要有俄罗斯的ERA-GLONASS系列标准和欧盟E-Call系列标准。俄罗斯联邦国家标准:GOST 55534《车内紧急呼叫系统—导航模块的试验方法》、GOST R54620-2011《全球卫星导航系统、事故紧急响应系统、应急勤务部门车载呼叫系统通用技术要求》、GOST R51794《全球导航卫星系统—坐标系》等。(原标准为俄文,名称为翻译)欧盟标准为:CEN/TS 16454:2012《Intelligent Transport Systems-ESafety-ECall end to end Conformance Testing》。
3.2、国内标准
国内卫星导航标准制定最初以各应用领域自制为主,民用标准主要分布在交通运输、信息通信、民航及空管、测绘勘探、防震减灾等各个行业,军用标准主要是机载和舰载设备的应用标准。
(1)在车载导航定位标准方面
已经发布的标准和规范主要有:GB/T 19392-2013《汽车GPS导航通用规范》、GB/T 19056-2012《汽车行驶记录仪》、JT/T 794-2011《道路运输车辆卫星定位系统车载终端技术要求》、交通运输部《道路运输车辆卫星定位系统北斗兼容车载终端技术规范》、JT/T590-2004《北斗卫星无线电测定业务(RDSS)民用车(船)载遇险报警终端设备技术要求和使用要求》、JT/T 808-2011《道路运输车辆卫星定位系统 终端通讯协议及数据格式》等。
(2)在信息通信行业
主要由中国通信标准化协会统一管理标准的制修订工作,其中与车载终端导航定位相关的在研标准和研究课题主要包括:《基于公众电信网的车载紧急报警系统 总体架构》、《基于公众电信网的车载紧急报警系统 终端技术要求和测试方法》、《车载移动通信终端导航定位射频接收机性能技术要求和测试方法》、《车载移动通信终端导航定位空间射频接收机性能技术要求和测试方法》等。
(3)在交通运输行业
交通运输部信息通信及导航标准化技术委员会正在制定《道路运输车辆卫星定位系统 北斗兼容卫星定位模块技术要求》、《道路运输车辆卫星定位系统北斗兼容卫星定位模块通讯协议》等标准。
2010年2月4日,为促进我国车载信息服务和车联网领域的技术创新和服务应用,由中国电子工业标准化技术协会发起成立了车载信息服务产业应用联盟(Telematics Industry Application Alliance,TIAA),全国数十家产学研用骨干单位参与了该联盟。目前,在TIAA 第六工作组,正在制定联盟标准《紧急救援系统 车载子系统技术要求》。
车载终端的导航定位标准涉及信息通信行业、交通运输行业等不同行业,在标准的制定过程中,如何进行统一协调是很大的问题。公众紧急报警传送及定位技术推进组、TIAA联盟等组织的成立都是为了组织协调不同的部门和单位,共同推动相关标准化的进展。这也是未来标准制定方式的一个发展趋势。
4、导航定位性能测试项目
不光车载终端,用户在使用任何带导航定位的终端时都会对其性能有一定的要求,如开机后多久能够获得定位结果?定位精度有多高?定位之后如果中断(如进入底下通道或隧道),出去多久之后可以再次重新定位?根据用户的这些性能要求,有不同的性能指标去衡量。主要测试指标包括首次定位时间、定位测速精度、失锁重捕时间、跟踪灵敏度、捕获灵敏度。
(1)首次定位时间(TTFF)
用于衡量接收机信号搜索过程的快慢程度,接收机的首次定位时间取决于初始状态,根据用户开机前的初始化条件,可分为冷启动首次定位时间、温启动首次定位时间和热启动首次定位时间,对于车载终端,一般测试冷、热启动的首次定位时间。3种初始化条件分别为:
● 冷启动:接收终端开机时,没有当前有效的历书、星历和本机概略位置信息。
● 温启动:接收终端开机时,没有当前有效的星历信息,但是有当前有效的历书和本机概略位置信息。
● 热启动:接收终端开机时,有当前有效的历书、星历和本机概略位置等信息。
(2)定位精度
是指接收终端在特定星座和星历条件下,接收卫星导航信号进行定位解算得到的位置与真实位置的接近程度,一般以水平定位精度和高程定位精度方式表示。测速精度是指接收卫星导航信号进行速度解算得到的速度与真实速度的接近程度。
所有的精度都是根据实际的测试数据使用某种统计学的方法出来的,根据选择的统计方法不同,计算的结果也会有很大的差异。常用的统计方法有均方根值(RMS)法和R95法。卫星导航接收机的水平定位精度均方根值为1.2m是指“使用测试数据统计得到,测量位置与真实位置之间水平误差的标准差为1.2m,也就意味着有约65%测量值与真实的误差在1.2m以内”。R95法意味这有约95%测量值与真实的误差在1.2m以内,R95法得到的精度值约为RMS法得到的精度值的1.7倍。因此,在了解精度量化数值的同时,必须要了解它是用何种统计方法描述的。
(3)失锁重捕时间
是指接收终端在丢失所接收信号状态下,从重新接收到信号开始,至终端设备输出符合定位精度要求的定位结果所需的时间。失锁重捕时间反映了在接收机信号失锁,定位中断后重新恢复定位的速度。失锁重捕时间短的接收机在易中断环境中(如隧道等)的定位性能好,因此失锁重捕时间可以有效评估车载终端的性能。
(4)跟踪灵敏度
是指被测设备在捕获信号后,能够保持稳定输出并符合定位精度要求的最小信号功率。评估的是接收机在已经定位的状态下,维持定位精度要求所需的最低接收功率。跟踪灵敏度是评估车载终端性能的关键指标之一。
(5)捕获灵敏度
是指接收机在失锁状态下,在规定时间内输出满足定位指标要求的最低接收信号功率。捕获灵敏度高的接收机有更强的捕获弱信号的能力,因此也是评估车载终端性能的重要指标之一。
用户提出性能指标主要是从体验的角度出发的,因此对不同的应用场景,用户最关注的指标不同。在常规驾驶车辆场景下,定位精度和捕获灵敏度对用户体验影响最大,而在紧急情况下触发定位报警时最关键的指标则是定位精度和跟踪灵敏度。所以,对于终端的导航定位性能测试,很多时候是针对终端使用场景定制测试项目。
从卫星信号的产生方式来划分,导航定位性能测试方法可以分为以下3类:
● 实验室测试,用卫星信号源模拟真实的卫星信号,这种测试方式场景可重现,应用较广泛。
● 实场测试,即利用天上真实的卫星信号进行测试,这种测试方式更贴近用户的真实体验,对车载终端的性能评估也很关键,但由于卫星信号受天气等各种因素影响,场景不可重现,且时间、经济成本较高,具有一定的局限性。
● 虚拟路测,通过卫星信号采集回放仪将卫星信号录制下来,在实验室中回放信号进行测试,这种方法兼具实验室测试和实场测试的优点;在这种方式中,如何保障卫星信号采集的完整性和回放的准确性是最大的挑战。
以上3种方式各有优劣,总体来说,虚拟路测是未来的发展趋势,带信道模拟的导航定位虚拟路测也已经开始研究。
从测试评估方式来划分,导航定位性能测试方法可以分为以下3类:
● 一定场景下的性能一致性测试,例如3GPP的A-GNSS测试都属于此类,测试终端在一定场景下(如在理想信号、多径环境、移动场景下等)能否满足要求,该测试只能得到终端通过还是不通过的结果,不能直接通过测试结果来评估终端之间的差异。
● 极限值测试,CTIA的空间射频接收机性能测试、国内检测机构(如定位总站)GNSS定位性能测试等都属于此类。这种方式会获得一个准确的数值,如定位精度是几米、捕获灵敏度是多少dBm等,这种方式的优势是能很直观地得到终端的性能,比较不同终端的性能差异;缺点是多次测试结果的一致性相对于第一类方法略差。
● 余量测试,介于以上两者之间的一种测试方式,基于3GPP定义的场景。首先测试该场景下是否通过,不断降低功率直到测试不通过,看最低能通过的功率与3GPP标准功率之间差异为多少,称之为“余量”。余量测试也可以反映用户在使用不同终端时的体验差异,目前通常用于厂家的定制化测试中。射频性能测试是车载终端导航定位性能测试的一个基础部分。本文将以极限值测试方式为例,说明车载终端的GNSS射频性能测试方法。
5、车载导航定位射频性能测试方法
5.1、导航定位射频性能通用方法
用卫星信号源模拟卫星信号的车载导航定位性能测试系统如图1所示。多系统导航信号源用于模拟卫星信号,被测终端通过射频线与信号源连接,车载终端通过串口线反馈定位结果信息。
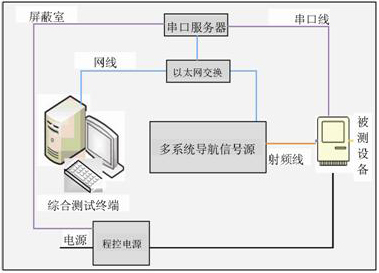
图1、车载导航定位射频性能测试系统
车载终端导航定位射频性能路测系统通过天线接收实际卫星信号进行测试,可以完成对天静态、对天动态性能实场测试,基于采集的卫星信号和记录的位置信息,可以进行虚拟路测。路测和虚拟路测系统如图2所示。

图2、车载导航定位射频性能路测和虚拟路测系统
不管采用实验室模拟测试、场测还是虚拟路测方式,车载导航定位射频性能测试项目都主要包括冷、热启动下首次定位时间、捕获灵敏度、跟踪灵敏度、失锁重捕时间、定位测速精度等。
基本测试方法与普通民用终端导航定位性能测试方法类似。另外,针对车载终端的应用场景,为了评估用户在使用时的体验性能,终端厂家一般还会增加一些车载特殊场景下定制化的定位测速精度。例如,起步场景(可以设置为静止120s,20s内匀加速到120km/h,然后保持匀速直线前进)、高速行驶场景(可以设置为保持速度为120km/h匀速直线运动)。
5.2、紧急情况下车载定位报警系统导航定位测试方法
对于紧急情况下车载定位报警系统导航定位测试,目前的测试系统一般采用图1的方式,测试项除了通用方法中提到的测试项之外,还有一些特殊测试项。以俄罗斯ERA GLONASS GOST 55534 标准为例,还包括检查定位结果信息输出格式是否符合NMEA-0183格式、自主完好性性检测算法(RAIM)、不同坐标系转换的能力(PE-90和WGS-84),以及谐波干扰、脉冲干扰下的抗干扰能力。
检查定位结果信息输出格式是否符合NMEA-0183格式,该测试项比较容易理解,NMEA-0183格式是目前国际上普遍使用的导航参数格式,参照NMEA 0183标准格式进行比对测试。
自主完整性检测算法(RAIM)是测试终端接收到故障卫星信号时,能否辨别出故障状态,并利用非故障卫星信号进行定位。
谐波干扰下的抗干扰测试是测试终端在谐波干扰下的定位性能是否满足一定要求。脉冲干扰下的抗干扰测试是测试终端在规定参数的脉冲信号干扰下,能否继续成功跟踪卫星信号。
总之,车载终端是导航定位终端的一个类别,其导航定位射频性能测试方法与普通终端有共同之处,也有针对其应用环境的特殊之处。其他类别的定位终端导航定位测试也是同理,根据其应使用环境定制合适的测试场景是有效评估其性能的关键。
6、结束语
本文主要介绍了车载终端的导航定位标准以及导航定位射频性能测试系统和测试项目。目前,车载终端的空间射频性能(OTA性能)正在研究之中,OTA测试比传导测试更能反映真实的用户体验,是未来车载终端导航定位测试的发展趋势。另外,由于车载终端定位时处于多种无线信号的干扰之下,多模组同时工作时终端导航定位抗干扰能力测试也越来越受关注。
参考文献
[1] 张钦娟, 李梦, 王娜, 任林林, 陈明浩, 陈晓晨. 北斗二号民用设备测试方法研究(J). 现代电信科技, 2014, 07:18~22.[2] 3GPP TS 37.571-1 V12.3.0 (2015-06) 3rd Generation Partnership Project Technical Specification Group Radio Access Network Universal Terrestrial Radio Access (UTRA) and Evolved UTRA (E-UTRA) and Evolved Packet Core (EPC) User Equipment (UE) Conformance Specification for UE Positioning Part 1: Conformance Test Specification
[3] GOST 55534. 车内紧急呼叫系统—导航模块的试验方法
作者简介:张钦娟,中国信息通信研究院泰尔终端实验室工程师
 粤公网安备 44030902003195号
粤公网安备 44030902003195号