1. 引言
在仪器仪表及测控技术中,无线数据通信以其节省传输线、使用方便等优点被广泛关注。中短距离(小于500 米)的无线通信在自动测试系统、无线抄表、计算机遥测遥控系统、车辆监控系统和小区管理等实际应用中有广泛的市场。在众多的无线收发芯片中,nRF401 以其成本低、可靠性高、外围设计简单广受欢迎,然而由于通信空间的复杂性,无线通讯系统很容易收到误码,即使在发送端不发送数据的情况下,接收端也仍然会接收到大量的干扰数据。在一个中等规模的系统设计中,CPU 要进行多种操作,如外部存储器的访问,传感器数据的处理等,因此无线通讯干扰信息较多时,特别是在中断通讯模式下,频繁的中断将严重影响主程序的运行,另外由于对nRF401 的操作除了控制输入输出外,还需要对nRF401的收发状态、运行模式切换,因此对于一个总线结构的系统(如485 通讯模式),无线通讯部分也作为一个独立ID 模块时,传统的设计处理遇到了困难。因此需要设置一个中间处理环节,既能有效过滤信息又不影响通讯速率。
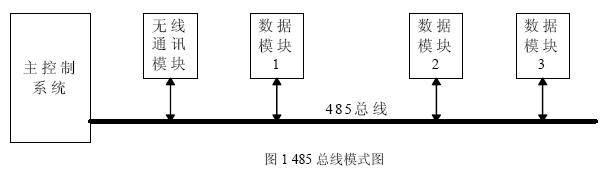
为解决上述问题,本设计基于nRF401 作为无线收发芯片,使用两片AT89C2051 作为控制芯片,设计出一套无线通讯系统。其中一片AT89C2051(定义为控制芯片A)控制nRF401,AT89C2051 的IO 接口与串口配合控制nRF401 实现异步通讯;另一片AT89C2051(定义为控制芯片B)既能满足总线串口的要求,又能解决控制芯片A 由于频繁串行中断而不能及时响应总线的问题,起到分担任务、隔离干扰、串口扩展的作用。采用两片2051单片机设计方法,与采用一片双串口单片机设计相比,能降低成本、提高芯片利用率、隔离干扰。实践表明该系统结构简单、抗干扰能力强,能很好解决短距离系统之间的无线通信问题。
2. 系统硬件设计
系统硬件设计包括无线通讯模块和通讯控制部分。
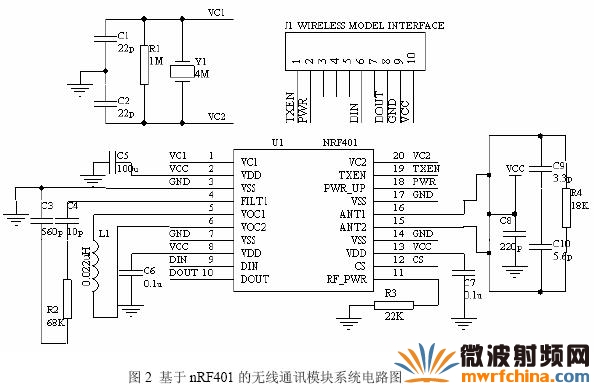
2.1 基于nRF401 的无线通讯模块设计
nRF401是Nordic公司研制的单片UHF无线收发芯片,工作在433MHz ISM频段。在接收模式中,nRF401被配置成传统的外差式接收机,所接收的射频调制的数字信号被低噪声放大器放大,经混频器变换成中频,放大、滤波后进入解调器。解调后变换成数字信号输出(DOUT端)。在发射模式中,数字信号经DIN端输入,经锁相环和压控振荡器处理后进入功率放大器射频输出。在本系统设计中,为了避免干扰,将基于nRF401的无线收发部分做在一块单独的PCB板上,引出通讯控制接口(J1),组成独立的无线收发模块。
2.2 基于AT89C2051 的控制系统设计
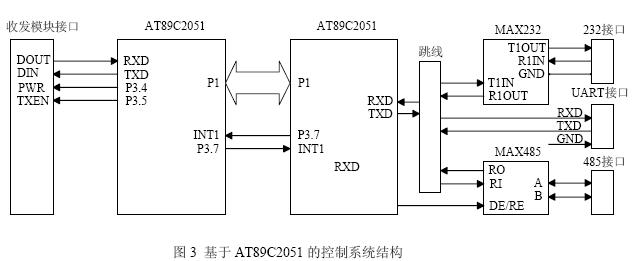
控制部分包括两片AT89C2051,控制芯片A 负责处理无线收发模块数据信息,并与控制芯片B 通过P1 口以中断1 方式进行数据交流。控制芯片B 负责处理来自串口的信息,并与控制芯片A 进行数据交流。由于两片AT89C2051 以中断方式并行传输模式传输数据,其数据交换时间远小于单片机串口通讯时间,因此不会影响整个系统的半双工通讯时间。为了满足各种要求,串口通过跳线被设计成232 模式、485 模式和UART 模式。
3. 系统软件设计
3.1 通讯协议
在无线通信的过程中,由于外部环境的干扰,通常误码率比较高,即使发射方不发送数据,接收方仍会经常接收到由于外部干扰而产生的杂乱数据,为了在接收的过程中区分接收到的数据是否为有效数据,必须有一定的通信协议。在传输数据量不大时,为有效处理信息,本系统设计以下通讯协议:
1) 无线收发数据帧由3个字节组成,即8bit的标识位(0xab),8bit的数据位,8bit的校验位。
2) 无线收发数据帧格式
byte1 高四位为1010(0xa),低四位为数据的高四位
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
1 0 1 0 D7 D6 D5 D4
Byte2 高四位为1011(0xb),低四位为数据的低四位
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
1 0 1 1 D3 D2 D1 D0
Byte3 为byte1与byte2的异或值。
3 内部单片机之间传输的数据不包括标识字节和校验字节。
4 系统与外部串行通讯时,采用另外的通讯协议(如Mod Bus协议)。
5 外部输入采用中断方式,内部循环采用查询方式。
6 程序设计中,外部中断优先,以及时接收外部数据信息。
7 执行某一中断时,不响应其他中断。
8 无线通讯模块平时处于接收状态。
3.2 程序流程
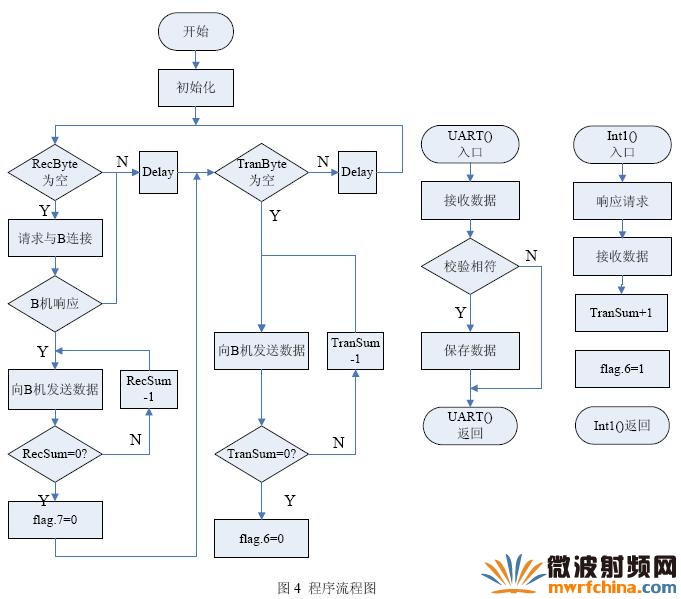
对于控制芯片A,接收无线收发模块数据为串行中断方式,接收控制芯片B 数据为外中断1 方式。主程序运行过程中始终处于检测系统状态字循环方式,当发送缓冲区有数据(来自控制芯片B)时,主程序调用串行发送程序将数据经串口、无线收发模块发送出去;当接收缓冲区有数据(来自无线收发模块)时,主程序调用并行发送程序将数据经P1 口发送到控制芯片B。在设计应将发送缓冲区和接收缓冲区设置为多字节,用来堆积不能及时转移的数据。控制芯片B 的程序流程与控制芯片A 流程相似,只是在接收串口数据时,控制芯片A 程序对数据帧的校验方式不同。
图4 为程序流程图,其中UART()定义为串行中断服务程序;Int1()定义为外部中断1 中断服务程序;TranByte 定义为发送缓存区;RecByte 定义为接收缓存区;Recsum 定义为接收缓存区计数;Transum 定义为发送缓存区计数;delay 定义为延时子程序;flag 定义为系统状态控制字,其中flag.7 定义为接收缓存区状态标志;flag.6 定义为发送缓存区状态标志。
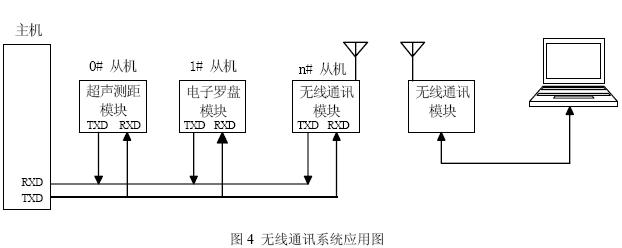
4. 在自主移动机器人系统中的应用
在自主移动机器人系统中,可靠稳定的通讯系统对机器人与上位机、机器人与机器人之间的信息交换是十分重要的。基于nRF401 的无线通讯系统可以作为中小型自主移动机器人的无线通讯部分,在应用中,将该系统通过跳线设置为RS232 模式与计算机串口相连,另一套系统设置为UART 模式与机器人其它部分组成多机通讯系统,这样便构建了一个机器人与上位机的一套无线通讯系统。
5. 结论
本文给出了一种基于nRF401 的无线通讯系统设计,该系统具有硬件电路简单、成本低廉、编程方便、可靠性高的特点。可以方便地应用于各种总线结构的系统中,作为其无线通讯部分,实现无线数据的双向传输。无线通讯系统传输的安全性和可靠性依赖于良好软件设计,由于外界干扰,无线通讯系统很容易收到误码,无线通讯程序设计中采用的短帧结构、三字节校验法,实践证明对过滤误码是很有效的。另外测试表明在最高通讯速率范围内,适当提高通讯速率可以减少误码率。
作者:李欣 王耀宾 杨华
 粤公网安备 44030902003195号
粤公网安备 44030902003195号