近年来射频识别(Radio Frequency of Identificatio,RFID)技术的应用逐渐广泛,同时也倍受重视。特别是UHF频段的RFID系统,由于其传输距离远、传输速率高,受到了更多地关注。典型的RFID系统由RFID阅读器和标签两部分组成,RFID无源标签依靠RFID阅读器发射的电磁信号供电,并通过反射调制电磁信号与阅读器通信。因此,RFID标签天线设计的优劣对其系统工作性能有关键的影响。
常见的射频识别阅读器天线有折合振子天线、分形天线、微带天线以及轴向模螺旋天线。由于折合振子天线和分形天线一般为线极化天线,难以满足阅读器对各方向电子标签的识别要求,所以在较多场合不适用;而微带天线由于其面积尺寸过大,在小型化的阅读器手持机上的使用受到了限制;轴向模螺旋天线同样因轴向高度过高,在实际使用中也受到了限制。因此,如何设计出一种小尺寸、低剖面、高性能的圆极化射频识别天线成为了关注的焦点。
四臂螺旋天线由于其圆极化性能出色,被广泛应用于GPS领域。随后经过进一步发展,Wang—lk Son等人将四臂螺旋天线应用至RFID,并利用平面倒F天线代替了传统的单极子天线作为四臂螺旋天线的天线臂,如图1所示,实现了良好的效果。文中利用该方式,设计了一种在尺寸和性能上更具优势的RFID阅读器天线。
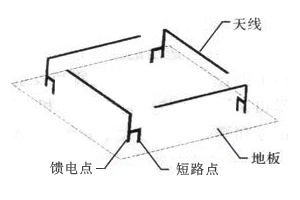
图1、倒F折叠四臂螺旋天线
1、小型化四臂螺旋天线的设计
1.1、四臂螺旋天线的设计
文中设计的倒F四臂螺旋天线的结构如图2所示。天线由4个完全相同的倒F天线组成,水平部分印制在介电常数为9.6,尺寸为60 mm×60 mm,厚度为1 mm的矩形微波复合介质板上,垂直部分印制在相同的4个厚度为1 mm的FR4小介质板上。4个天线馈电为等幅馈电,相位按逆时针相位依次滞后90°,形成右手圆极化。
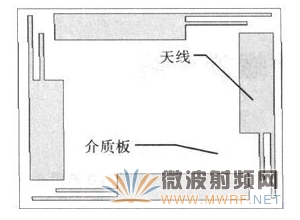
图2、倒F四臂螺旋天线结构示意图
由于螺旋天线的4个臂相距较近,相对两臂之间的距离约为0.18 λ,天线4个臂之间的耦合较强。因此,在4个单独端口进行匹配时,不能按传统的方法,将每个端口单独匹配,再加功分网络,则应充分考虑4个臂之间的耦合。利用Ansys HFSS进行仿真可发现,位置相对的臂之间的耦合要远大于相邻臂之间的耦合,如图3所示。是因为相对两个臂上的电流相互平行,所以相互影响过大,而相邻臂上的大部分电流相互垂直,则影响较小,因而在一定范围内只考虑相对臂之间的耦合。假设4个天线臂端口按逆时针分别为端口1、端口2、端口3和端口4,反射系数分别为Γ11、Γ22、Γ33和Γ44,相对天线臂之间的耦合系数为M13和M24,由于天线两对臂之间的对称性,所以只需分析天线臂1和3之间的关系。假设端口1处的相位为0,能量从端口1传输到端口3产生的相位差为θ,而端口1和端口3的馈电相位相差180°,则从端口1耦合到端口3的能量在天线臂3端口处产生的相位为-180°-θ,由于天线间距较小,θ较小,所以可认为端口1耦合到端口3的能量在端口3处的相位为-180°。端口3的馈电相位为-180°,则其反射能量的相位为180°。在端口3处看,从端口送出的能量包含端口3反射的能量和端口1耦合的能量,上文已得出反射能量和耦合能量在端口3处的相位分别为180°和-180°,所以当反射的能量和耦合的能量大小相等时,其等幅反相相互抵消,达到最佳匹配效果,即
Γ33=M13 (1)
反之满足Γ11=M13时,端口1处达到最佳匹配。同理可分析端口2和端口4。
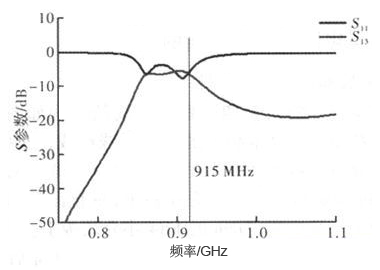
图3、天线的S参数仿真结果
1.2、馈电网络的设计
 粤公网安备 44030902003195号
粤公网安备 44030902003195号