在美国,如果要想使用未经FCC认证的无线设备,必须先申请临时许可,否则是违法行为。2017年3月17日,日本车用电子供应商AlpsElectric 申请了STA 许可证,AlpsElectric 要测试的是名为Ukaza 的车用毫米波雷达,工作频段为76-81 GHz。这是该频段毫米波雷达第一次公开测试。在申请中,AlpsElectric 表示,公司想从5 月1 日起陆续测试3,000 台Ukaza。Alps表示每辆车需要装配10 组雷达,因此3,000 台Ukaza 只够300 辆车使用。
10 天后,通用也向FCC 递交了类似的STA 许可证申请,它要测试的也是Ukaza 雷达。不过,通用工程师Robert Reagan 在申请中要求FCC 帮忙保密,因为测试涉及商业敏感信息。显然,ALPS的毫米波雷达是用在通用汽车上的,这就是通用要打造的300辆的无人驾驶测试车队(以Bolt EV为基础打造,拥有两个Velodyne的32线激光雷达)。
Ukaza 雷达可不是Bolt 的唯一装备,3 月28 日(通用申请后一天)博世也递交了自己的STA 许可证申请。博世申请中表示,公司要在客户的自动驾驶车队测试中程雷达(77GHz),随后透过搜集的数据开发新的算法。从申请来看,博世要测试的雷达共有650 组,够162 辆车使用。每辆车4个,与Alps 公司类似,博世也没有点出客户的名字,但给了测试的具体地点,从经纬度来看,这些雷达将在旧金山、底特律和斯科茨代尔测试,唯一横跨这三地测试的公司只有通用一家。

上图是美国丰田研究院的无人驾驶车,车每侧有3个毫米波雷达,推测是博世比较老的透镜毫米波雷达,每侧3个,估计是级联应用。一台车用10个毫米波雷达,应该也是级联应用。
紧接着在5月16日,德州仪器推出了号称全球精度最高单芯片毫米波雷达传感器,也就是工作与76-81GHz的AWR1x和IWR1x收发器,然后基于这两片收发器推出了数个76-81GHz毫米波雷达前端,包括AWR1243、AWR1443、AWR1642。
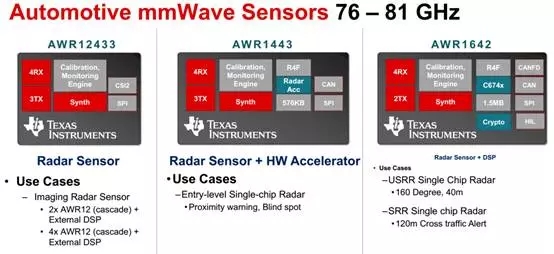
其中AWR1243明确指出,这是一个图像雷达传感器。这就超出大多数人的思维定势,毫米波雷达怎么能做图像传感器。当然这个不是采用SAR合成孔径的成像雷达。

德州仪器不仅说是图像传感器,更是在接下来的文档里将4个AWR1243级联,达到高分辨率图像。不过这个还是有点夸张了,德州仪器可能是特别强调级联雷达的高分辨率,但要说光学图像级的分辨率还是不可能的。NXP则提出蚕茧式(Cocoon)毫米波雷达概念。也有可能是级联应用。

用多个雷达像茧一样把蚕(车)包起来。
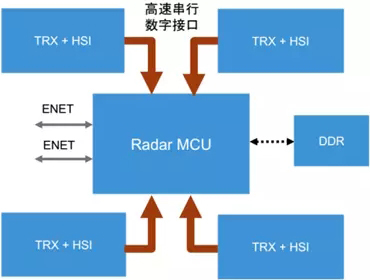
这就是雷达传感器分布集中式处理,传感器里只获取最基本的雷达数字信号,雷达数字信号集中处理,包括物体侦测、追踪甚至是图像处理。
76-81GHz雷达的历史
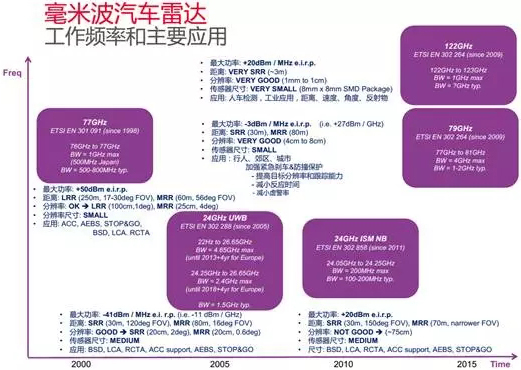
上图为欧洲的毫米波雷达频谱标准发展历程(来源:是德科技)。
最早毫米波雷达是24GHz的窄带毫米波雷达,带宽通常不到200MHZ,精度只有75厘米,目标分离能力只有1.5米,显然这太低了,即便作为盲点检测也有点低了。这之后出现了超宽带24GHz毫米波雷达,带宽最高达7GHz,精度可达2.2厘米。但是它有一个明显的缺点,就是发射功率太低,信噪比偏低,发射功率太低意味着探测距离有限,典型的5GHz带宽的超宽带24GHz毫米波雷达最大探测距离大约为30米。再有就是干扰风险(Interference Risk),频率越低,干扰风险越高。窄带24GHz毫米波雷达的干扰风险是最高的,超宽带24GHz毫米波雷达略好,77GHz和79GHz就非常好。同时24GHz毫米波雷达的体积也比较大。此外,为了给5G或6G留出足够的频谱空间,汽车雷达也不得不向更高频率转移。
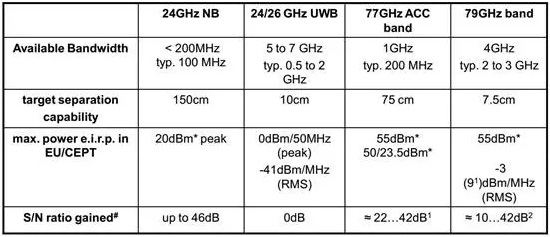
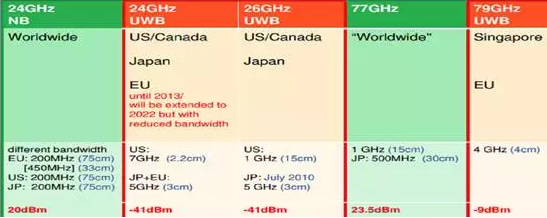
为了达到高精度,同时还消除24GHz超宽带毫米波雷达的缺点,79GHz毫米波雷达出现了 。在WRC-15之前,车载雷达尚没有全球 统一的频率划分,各汽车制造大国的微波车载雷达所使用的频率主要集中在23-24GHz、60-61GHz和76-77GHz三个频段。在欧洲,欧盟委员会决定从2013年起,会逐渐将车载雷达的使用频率24GHz频段调整到79GHz频段。美国则使用24GHz和76~77GHz两个频段。日本是世界上唯一将车用雷达的频段确定在60-61GHz的国家,后来又将79GHz频段作为车用雷达系统的使用频段。在WRC-15上,将79GHz频段划分给无线电定位业务,以支持短距离高分辨率车载雷达的发展。中国刚完成24GHZ的频谱规划,77GHz还未有规划标准。
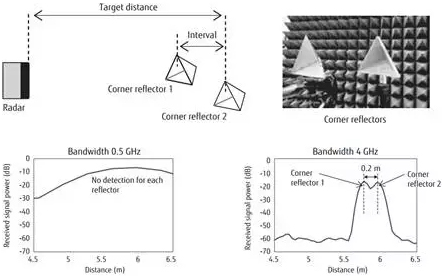
上图是500MHz带宽的77GHz FMCW雷达与4GHz带宽的79GHzFMCW雷达的对比,对于500MHz带宽的雷达,两个反射物都检测不到,79GHz都能检测得到,并且可以大致推算出两者间的距离。77GHz的目标分离精度是75厘米,也就是1.5米内的目标会被忽略,因此它只能检测车辆。
MIMO与级联
多输人多输出系统(MIMO,Multiple input multiple output)原本是控制系统中的一个概念,表示一个系统有多个输入和多个输出.如果将移动通信系统的传输信道看成一个系统,则发射信号可看成移动信道(系统)的输入信号,而接收信号可看成移动信道的输出信号。IM O 雷达的基本含义是:雷达采用多个发射天线,同时发射相互正交的信号,对目标进行照射,然后用多个接收天线接收目标回波信号并对其进行综合处理,提取目标的空间位置和运动状态等信息。
MIMO雷达虚拟阵的一个典型应用是用于雷达二维成像,雷达二维成像的距离分辨力 主要取决于雷达信号的带宽,方位分辨力主要取决于天线的波束宽度。要提高成像的距离分辨力,需要增加雷达信号的带宽是相对比较容易的。而要提高雷达信号的方位分辨力,需要增大天线或阵列的孔径,而这在实际中受到多方面因素的限制,有很大的难度。目前广泛采用的解决办法是采用合成孔径技术,在不增加天线物理尺寸的基础上,得到大孔径的阵列。与合成孔径的思想不同,MIMO 雷达是利用多发多收的天线结构等效形成虚拟的大孔径阵列,获得方位上的高分辨力。而这种虚拟阵的形成是实时的,能够避免传统的ISAR成像中存在的运动补偿问题。 故MIMO 雷达在成像应用上有其独特的优势。
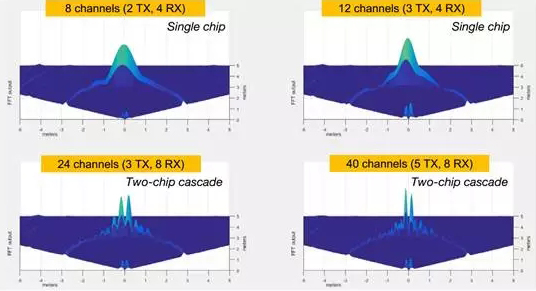
上图为德州仪器测试的多片级联雷达(MIMO)的FFT输出图,很明显通道数越多,精细程度就越高。
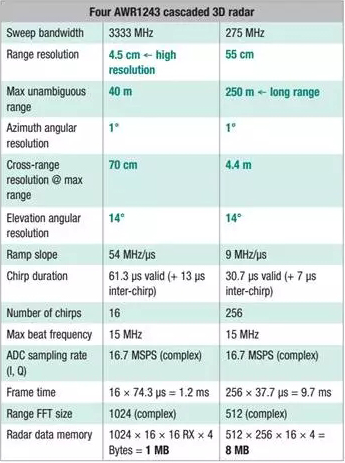
上表为德州仪器4个AWR1243级联后雷达的参数,远距离分辨力大大提高,40米处可以做到1度的方位角分辨率,也就是4.5厘米的精度和大约9厘米的物体分离精度。如果是百万像素45度FOV的摄像头,那么40米处只有大约20像素的方位角分辨率,无法分清行人和骑行者。MIMO具备很宽的FOV,像德州仪器这种4个级联的雷达FOV高达192度。而摄像头的话80度的FOV 都算是广角了,边缘处可能有广角失真。
一对发射阵元和接收阵元可以虚拟出一个收发阵元,则对于M发N收的MIMO雷达 ,发射阵元和接收阵元共有M* N对 ,即可以虚拟出M *N个收发阵元 ,其个数一般是远远大于N的,从而实现了阵列孔径的扩展。例如2发4收的MIMO雷达,可以形成8元的虚拟阵列。
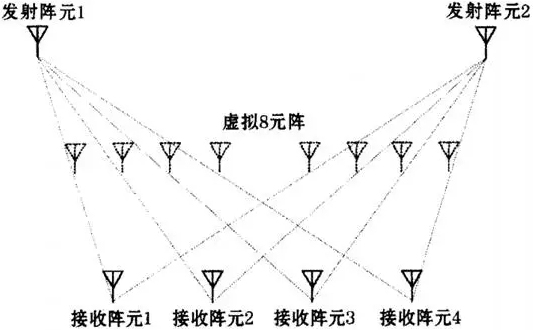
德州仪器使用4个3发4收的AWR1243雷达,就是192个虚拟通道(天线或者叫阵列)。
79GHz雷达更适合CMOS RF工艺
毫米波雷达最突出的优势是价格低廉,即便是和视觉系统相比价格也不高。同时毫米波雷达是主动型器件,而视觉系统是被动型器件,主动型器件有比较广阔的挖掘潜力。被动型器件,cmos图像传感器自问世以来,整体结构未有变化。而收发器从SiGe转换为硅基CMOS后,性价比进一步提升。
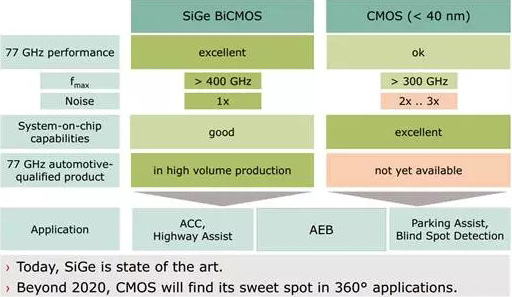
79GHz很适合多个级联应用,对价格敏感程度更高,采用硅基CMOS的需求更强烈。早在2013年,松下和富士通就开发了79GHz的硅基CMOS工艺,NXP大约在2015年底推出79GHz硅基CMOS工艺雷达收发器芯片,为40纳米CMOS RF 工艺。
2016年6月,英飞凌和比利时IMEC推出28纳米CMOS RF 工艺的79GHz雷达收发器芯片。在2017年2月,老牌模拟IC半导体厂家ADI推出28纳米CMOS RF 工艺的79GHz雷达收发器芯片,ADI特别称之为Drive 360技术,推测也是采用多个雷达级联。
2017年4月,ADI则与瑞萨展开77/79GHz雷达合作,ADI将使用瑞萨的Autonomy平台的RH850/V1R-MMCU配合它家的毫米波雷达,据称这是一款针对毫米波雷达开发的MCU。
标准的无人驾驶系统中,激光雷达是主传感器,负责3D周边环境数字建模,提供SLAM。为路径规划和自主导航提供基础。摄像头主要是识别交通标识。毫米波雷达目前主要是两点应用,一是检测目标的移动速度然后与激光雷达融合,激光雷达也可以做到,但是毫米波雷达测速更加方便快捷。二是碰撞预警或避免碰撞。一旦侦测到有碰撞的潜在威胁,加速或减速来避免。可以称之为360度防撞雷达,这也是未来多个79GHz雷达的典型应用。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号