最近一条关于谷歌的新闻在科技行业炸开了锅。谷歌进行了重大的结构性调整,新成立控股公司“字母表”Alphabet,它会在几个月内速度成为统领谷歌所有业务的母公司。而现在的谷歌会变成旗下的子公司,并且负责的范围会精简成搜索、YouTube、安卓和其他一些核心业务。原因有很多,最简单粗暴的原因就是让投资人们别再瞎担心谷歌在"黑科技"方面乱花钱。说起谷歌的尖端"黑科技",比较知名的其中一项就是无人驾驶车。
无人驾驶车的无人驾驶技术,由红外装置,惯性INS系统,GPS导航装置,和雷达测距装置组成,与射频微波相关的是后两种。其中很重要的一项技术就是GPS定位,现在小花来带大家了解下这项内容。
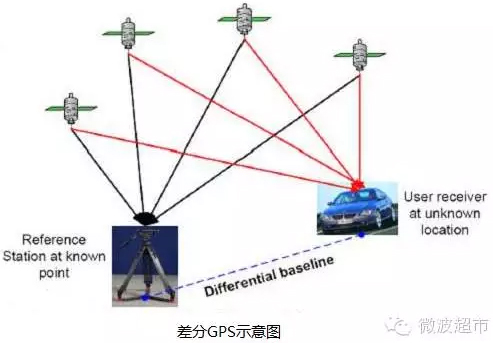
常用的GPS导航高达几十米的偏差,无法实现无人汽车位置精度的要求,偏差的积累也许都能带着想去南京的你一路狂飚到上海哦。因此无人汽车要使用精确到毫米级的高精度GPS。那么GPS是什么呢?GPS是一种高精度卫星定位导航系统,基本定位原理是:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后经过计算求出接收机的三维位置三维方向以及运动速度和时间信息。单GPS系统提供的定位精度是优于25米,而为得到更高的定位精度,通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。根据基准站已知精密坐标,算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
但通常的差分GPS技术还是无法满足无人车对精度的要求,无人车运用的是载波相位差分技术。载波相位差分技术又称为RTK技术(real time kinematic),是建立在实时处理两个测站的载波相位基础上的。它能实时提供观测点的三维坐标,并达到毫米级的高精度。
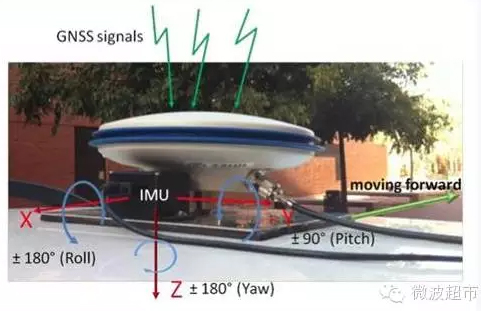
与伪距差分原理相同,由基准站通过数据链实时将其载波观测量及站坐标信息一同传送给用户站。用户站接收GPS卫星的载波相位与来自基准站的载波相位,并组成相位差分观测值进行实时处理,能实时给出毫米级的定位结果。无人汽车在运用载波相位的基础上,必须得有两个固定天线,通过每根天线高频率的采样探测出来的位置,就可以模拟汽车的行驶状态,进而得知它的行驶方向和姿态。
其实无人驾驶技术早就已经在我国农业运用,无人机、电力巡检等得到了广泛运用。未来无人驾驶车一定会大力普及,想想轻松到达目的地和驾校师傅脸绿的样子,真是太兴奋了。
 粤公网安备 44030902003195号
粤公网安备 44030902003195号